A Reconfigurable Omnidirectional Triboelectric Whisker Sensor Array for Versatile Human–Machine–Environment Interaction
Weichen Wang#, Jiaqi Zhu#, Hongfa Zhao#, Fei Yao, Yuzhu Zhang, Xiankuan Qian, Mingrui Shu, Zhigang Wu, Minyi Xu, Hongya Geng*, Wenbo Ding*, and Juntian Qu*
Nano-Micro Letters (2026)18: 76
https://doi.org/10.1007/s40820-025-01930-x
研究背景
随着机器人与智能系统向日常生活与工业场景的深度渗透,人-机-环境交互的复杂性与多样性对传感界面提出了更高要求:不仅需要实现多向力与运动的高精度感知,还需适应动态变化的非规则表面,同时具备单元级可重构能力。当前柔性传感阵列多存在部署灵活性不足、感知维度有限、表面适应性差等问题,难以满足复杂交互场景的需求。触须启发式结构因具备紧凑性与独立部署优势,成为构建可重构传感界面的理想选择,但现有设计常面临锚定稳定性与传感精度的双重瓶颈——传统锚定方式(如微棘、干黏附、真空吸盘)难以平衡便携性与表面适应性,而多方向感知则需依赖复杂电极阵列,增加了系统体积与信号复杂度。MXene等二维材料凭借高导电性与电负性,为提升传感性能提供了新路径,如何将其与仿生结构结合,实现“高精度感知-灵活部署-稳定锚定”的一体化设计,成为突破当前技术瓶颈的关键。
本文亮点
1. 采用MXene/硅胶纳米复合材料的双三角电极布局,仅使用两个电极即可实现全向力检测(阈值:0.024 N)和角度分辨率(5°)。
2. 基于兼具高机械强度与优异吸水性的新型水凝胶,该无束缚水封真空吸盘可实现紧凑结构在多样化表面上的稳健可逆锚固,单次复水即可维持超过200次循环的高锚固力。
3. 可重构全向摩擦电触须传感器阵列在实际应用中展现卓越性能,涵盖遥操作、可调式机械臂触觉感知及机器人自主环境探索领域,验证其作为动态人机环境交互通用接口的潜力。
内容简介
开发高效、多功能且高精度的感知接口,仍是人-机-环境交互应用中的关键挑战。尽管交互导向的感知皮肤技术取得进展,但在单元级重构、多轴力与运动感知,以及动态变化或不规则表面上的稳健运行方面仍存在局限。清华大学曲钧天/丁文伯/耿洪亚等开发了一种可重构全向摩擦电触须传感器阵列(RO-TWSA),由多个集成摩擦电触须结构(TWS)与无束缚水封真空吸盘(UHSVS)的传感单元组成,实现可逆便携部署及在多样化表面上的全向感知能力。采用简易双三角电极布局,配合MXene/硅胶纳米复合介电层,该传感器单元可实现精准的全向力感知,检测阈值低至0.024N,角度分辨率达5°;而UHSVS通过采用兼具高机械强度与卓越吸水性的新型水凝胶,为传感器单元提供可靠可逆的多表面锚定能力。大量实验验证了RO-TWSA在远程操作、触觉诊断及机器人自主探索等多场景交互中的有效性。总体而言,该系统作为多功能高分辨率触觉接口,为复杂现实环境中的智能感知与交互开辟了新路径。
图文导读
I TWS在不同负载参数下的性能表现
为解决复杂交互场景下的传感需求,RO-TWSA系统由多个独立传感单元组成,每个单元包含顶部的摩擦电触须结构(TWS)与底部的无束缚水封真空吸盘(UHSVS),整体重量仅4.6g,可灵活重构以适配不同任务。
摩擦电触须结构(TWS)采用仿生设计:以碳纤维棒为核心,外包MXene/硅胶复合材料(MXene浓度优化为4 wt%,可使电压提升2.05倍),周围环绕有两个镜像对称三角铜电极的聚酰亚胺(PI)基板。工作时,外部力使碳纤维棒偏转,MXene/硅胶与电极接触面积变化引发电荷转移——两电极信号之和反映力的大小,信号差值则指示偏转方向,实现仅用两个电极即可完成全向感知。实验中,通过线性电机与旋转平台驱动TWS,验证了其0.024 N的力阈值与5°的角度分辨率,且在50,000次循环测试后输出仍稳定。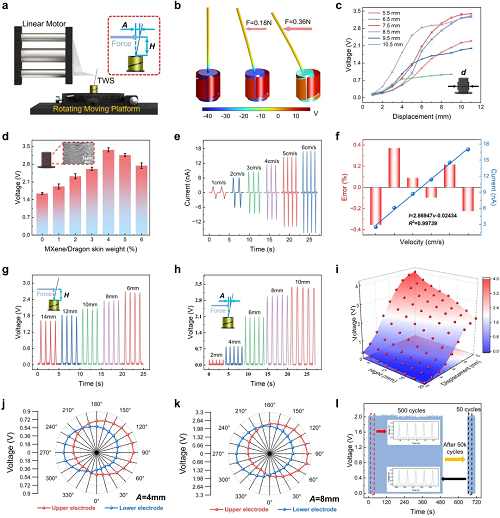
图1. TWS在不同负载参数下的性能表现。
II UHSVS的设计与特性分析
无束缚水封真空吸盘(UHSVS)灵感源自章鱼吸盘:采用双层吸盘结构,内部嵌入高吸水性水凝胶(由甲壳素、丝素蛋白与羟基化碳纳米管复合而成,孔隙率达76.2%),吸盘边缘则涂覆亲水性PBP-硅胶环。按压吸盘时,水凝胶释放水分形成液体密封,PBP-硅胶环减少水分流失;拆卸时仅需按压吸盘褶皱引入空气,水凝胶可快速吸水恢复形态。该设计使吸盘在塑料、玻璃、陶瓷、木材等多种表面上,均能实现稳定锚定力,且200次吸附循环后性能无明显衰减。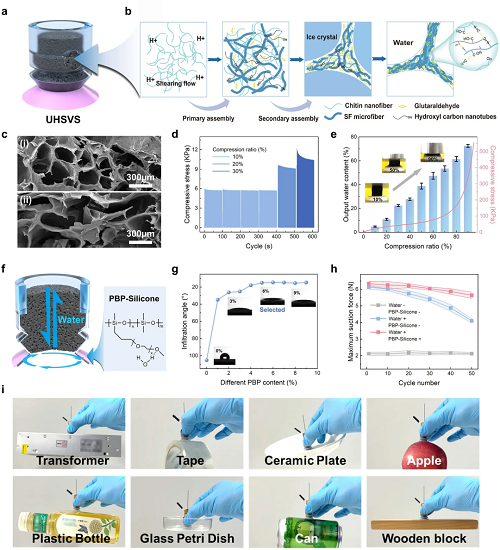
图2. UHSVS的设计与特性分析。
III 易部署遥操作(人-环境交互)
将两个传感器单元锚定于塑料直尺,构建便携式遥操作手柄:右手单元控制移动机器人的前进、后退、右转、左转(对应0°、180°、90°、270°四个方向偏转),左手单元控制机器人臂的伸展、收缩、夹爪开合。实验中,用户通过偏转触须发送指令,系统实时映射至机器人动作,成功实现对机器人的精准操控。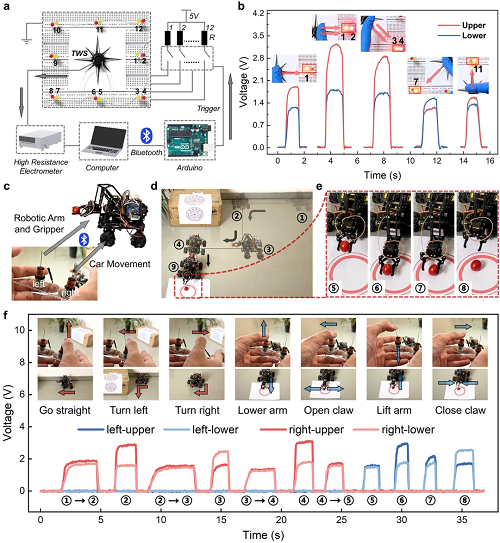
图3. RO-TWSA技术实现便捷部署的遥操作系统。
IV 分辨率可调机械臂触诊(人-机器人交互)
利用卷积神经网络(CNN)对传感器采集的纹理信号进行分类,对5类纹理(拱形、梯形、三角形、矩形、锯齿形)的识别准确率达97.4%,为临床触诊提供了技术支撑。
针对生物组织检测中“大范围定位-高精度扫描”的需求,将传感单元搭载于机械臂末端,通过更换支架调整阵列密度:1、粗定位阶段:采用平面支架,快速扫描猪表皮组织(模拟人体皮肤),当检测到皮下嵌入的3D打印半球体(模拟肿瘤)时,信号峰值触发定位;2、精细扫描阶段:更换凹面支架,通过高分辨率信号绘制肿瘤轮廓。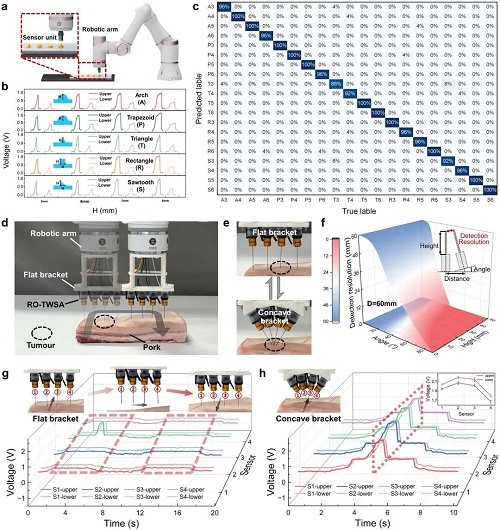
图4. 基于RO-TWSA技术的分辨率可调机械臂触诊系统。
V 械臂触诊(人-机器人交互)
在移动机器人四角部署4个传感器单元,通过两种部署模式实现功能切换:1、避障模式(D1部署):单元朝向机器人前方与上方,当触须接触障碍物时,信号变化触发机器人转向。2、地图构建模式(D2部署):单元朝向前后左右,机器人通过旋转扫描,结合传感器接触信号与运动距离,在MATLAB中重构矩形和三角形封闭空间的地图,实现未知环境的自主探索。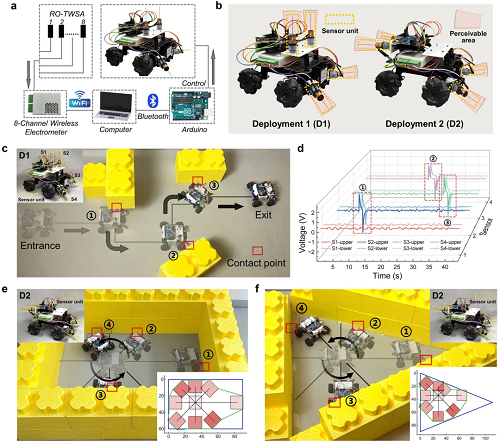
图5. 基于RO-TWSA实现的功能可切换机器人自主环境探索。
VI 总结
本研究提出一种由多个传感单元构成的可重构全向摩擦电触须传感器阵列(RO-TWSA),为解决多功能传感界面开发面临的挑战提供了新颖且有效的方案。无束缚水封真空吸盘(UHSVS)与摩擦电触须结构(TWS)相结合,不仅能实现传感单元在多种表面上的可靠、可逆部署,还能保证全向力与运动感知的高精度。在硅胶材料中掺入4 wt%的MXene,可使开路电压提升2.05倍;将其与双三角电极设计相结合,仅通过两个电极就能实现精准感知,力检测阈值达0.024N,角度分辨率达5°。大孔水凝胶具有优异的吸水与保水性能,而聚二甲基硅氧烷-b-环氧乙烷(PBP)的引入则显著提升了吸盘底座的亲水性;二者协同作用,使无束缚水封真空吸盘(UHSVS)无需外部供水,即可为传感单元提供稳定的多表面液封吸附效果。该传感单元耐用性出色,经过5万次感知循环与200次锚定测试后,仍能保持稳定性能。
通过在多类人-机-环境交互场景中的成功应用,可重构全向摩擦电触须传感器阵列(RO-TWSA)的性能得到验证,包括易部署遥操作(人-环境交互)、分辨率可调机械臂触诊(人-机器人交互)以及功能可切换机器人自主环境探测(机器人-环境交互),充分体现其高可靠性、多功能性与广泛适用性。未来,该传感器阵列有望融入机器人、可穿戴系统及复杂环境中,为开发柔性、便携且可重构的交互界面提供有效方案,推动复杂动态场景下自适应触觉智能的发展边界。
作者简介



▍Email:geng.hongya@sz.tsinghua.edu.cn
撰稿:原文作者
编辑:《纳微快报(英文)》编辑部
关于我们
Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » NML封面文章|清华大学曲钧天/丁文伯/耿洪亚等: 可重构全向摩擦电触须传感器阵列
 青科大朱之灵/陈德宏等综述:生态纳米酶学—连接能源、环境与生态的新型催化范式
青科大朱之灵/陈德宏等综述:生态纳米酶学—连接能源、环境与生态的新型催化范式 上海大学等国际合作重磅综述:二维材料赋能神经形态计算——从原子级器件到低功耗自适应系统
上海大学等国际合作重磅综述:二维材料赋能神经形态计算——从原子级器件到低功耗自适应系统 A3-083展位|欢迎光临中国材料大会NML展位交流讨论
A3-083展位|欢迎光临中国材料大会NML展位交流讨论 韩国Cheol-Min Park等:同时适配液态/固态锂电池的多功能导电弹性复合基硅负极 原创 纳微快报 纳微快报 nanomicroletters 2026年7月13日 06:00 上海 在小说阅读器读本章 去阅读 在小说阅读器中沉浸阅读 韩国Cheol-Min Park等:同时适配液态/固态锂电池的多功能导电弹性复合基硅负极 原创 纳微快报 纳微快报 nanomicroletters 2026年7月13日 06:00 上海 在小说阅读器读本章 去阅读 在小说阅读器中沉浸阅读
韩国Cheol-Min Park等:同时适配液态/固态锂电池的多功能导电弹性复合基硅负极 原创 纳微快报 纳微快报 nanomicroletters 2026年7月13日 06:00 上海 在小说阅读器读本章 去阅读 在小说阅读器中沉浸阅读 韩国Cheol-Min Park等:同时适配液态/固态锂电池的多功能导电弹性复合基硅负极 原创 纳微快报 纳微快报 nanomicroletters 2026年7月13日 06:00 上海 在小说阅读器读本章 去阅读 在小说阅读器中沉浸阅读