研究背景
软体机器人凭借其具有连续变形能力,同时能安全地与人类及环境交互的特性,在医疗康复、微创手术及狭小空间探测等领域展现出巨大潜力。然而,能源供给一直是制约其向全自主、长续航和微型化方向发展的核心瓶颈。目前主流的软致动器多依赖外部气源或携带笨重的锂电池。相比之下,化学燃料(如氢气、甲醇、乙醇等)不仅拥有远高于锂离子电池的能量密度(例如甲醇的比能量约为锂电池的10倍以上),而且能够直接通过化学反应释放能量。 尽管已有研究探索了燃料驱动技术,但关于如何高效地将化学能转化为机械能,以及如何构建无需外部辅助的自维持系统,仍缺乏系统性的总结与指引。在此背景下,通过深入剖析燃料驱动软致动器的工作原理、最新进展及未来挑战,为构建下一代高能效自主软机器人提供了重要的理论框架。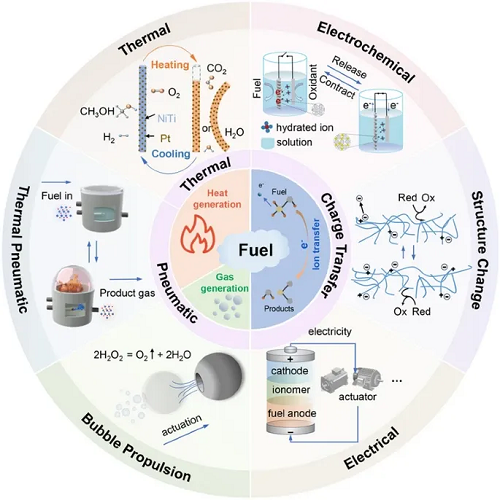
Fuel-Powered Soft Actuators: Emerging Strategies for Autonomous and Miniaturized Robots
Cheng Zhou#, Zhoutao Li#, Hailong Wei, Guorong Zhang, Fengrui Zhang, Xiaoshuang Zhou, Hongwei Hu, Guanggui Cheng, Jianning Ding, Shi Hyeong Kim, Ray H. Baughman, Xinghao Hu*
Nano-Micro Letters (2026)18: 129
https://doi.org/10.1007/s40820-025-01969-w
本文亮点
1. 高能密,长续航:系统阐述了燃料驱动软致动器的高功率密度优势,揭示了其摆脱外部缆线束缚、在长距离及微型化复杂环境中实现高效自主运行的内在机制。
2. 全机制,深解析:全面归纳了四大核心驱动机制——电子转移诱导电荷注入、聚合物结构变化、燃料燃烧热致动及气体产生气动致动,并对比了各技术路线的性能特点。
3. 绘蓝图,探未来:深刻剖析了当前技术在能量转换效率、控制精度及系统集成度方面面临的挑战,并为燃料驱动软机器人的微型化与智能化发展指明了路径。
内容简介
针对软体机器人面临的能源供给挑战,江苏大学胡兴好团队发表综述,指出利用燃料驱动软致动器是实现机器人自主化与长续航的关键突破口。该综述系统将燃料化学能转化为机械能的策略划分为直接转换与间接转换两大类,并详细论述了四种核心工作原理:利用燃料氧化释放电子诱导材料变形的电荷注入机制、氧化还原反应直接改变聚合物链的化学结构变化机制、利用燃烧或催化分解热量驱动热响应材料的热致动机制,以及通过催化分解产生大量气体驱动流体网络的气动致动机制。文章不仅涵盖了从微米级催化马达到宏观人工肌肉的广泛应用,还重点探讨了如何通过材料设计和结构优化进一步提升能量转换效率。
图文导读
I 燃料驱动软致动器的全景图谱
如图1所示,展示了燃料驱动软致动器的全景技术图谱。化学燃料的能量可以通过多种路径转化为机械能:电化学路径利用燃料在催化剂作用下的氧化还原反应,产生电子转移或离子迁移直接驱动致动器变形;结构变化路径通过化学反应直接改变材料分子结构;热能路径利用燃料(如甲醇、氢气)燃烧或催化分解释放的热量驱动热响应材料;而气动路径则通过化学反应(如双氧水分解)产生的气体压力,利用气动机制驱动机器人运动。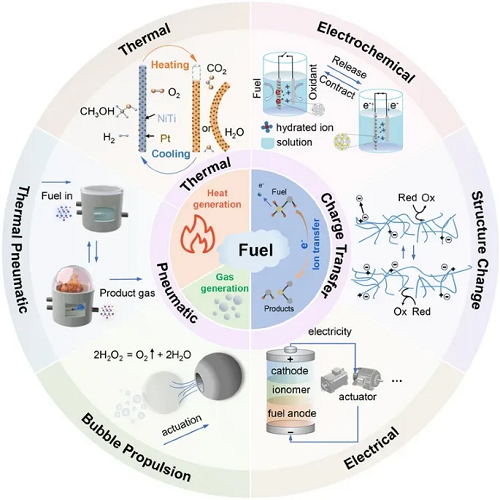
图1. 燃料驱动软执行器概述。
II 仿生人工肌肉:电荷转移诱导致动
图2展示了受生物骨骼肌ATP能量转换机制启发的燃料驱动人工肌肉。研究人员不仅模拟了骨骼肌利用ATP驱动蛋白丝滑动的生物机制,还开发了多种高效构型:双室燃料电池肌肉利用氢气和氧气在分离电极上的反应产生电势差,驱动碳纳米管(CNT)薄膜致动;为简化结构,单室设计无需离子交换膜即可通过交替通入气体实现可逆致动;此外,基于CNT纱线的人工肌肉能利用双氧水作为单一燃料,通过催化分解产生的电子注入实现纱线的收缩与舒张。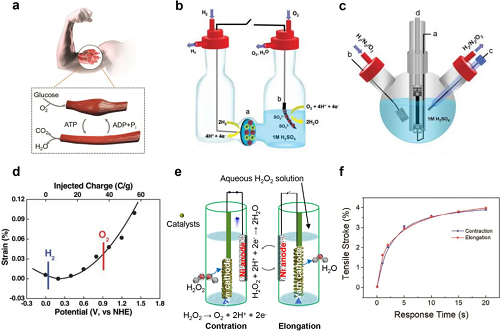
图2. 由燃料反应诱导的离子注入驱动的燃料供电纱线人造肌肉。
III 聚合物的化学结构变形
图3聚焦于聚合物结构变化驱动机制。该类致动器利用燃料(如葡萄糖、乙醇)的氧化还原反应,直接诱导导电聚合物(如聚吡咯PPy)的主链发生氧化或还原,伴随着离子的掺杂与脱掺杂,导致聚合物体积的膨胀或收缩。这种机制直接将化学能转化为聚合物的构象变化,无需复杂的中间电路,实现了类似生物肌肉的“化学-机械”直接转换。
图3. 由燃料诱导结构变化驱动的聚合物致动器。
IV 热致动机制:形状记忆合金的“燃料记忆”
图4展示了燃料驱动热致动器的基本原理。系统利用催化剂(如铂Pt)促使燃料(如甲醇、氢气)在催化表面发生放热反应,产生的热量传递给形状记忆合金(SMA)。当温度超过相变点时,SMA从马氏体转变为奥氏体,恢复预设形状,从而产生巨大的收缩力或弯曲变形。这种方式充分利用了燃料的高燃烧热值,能够产生高功率密度的致动效果。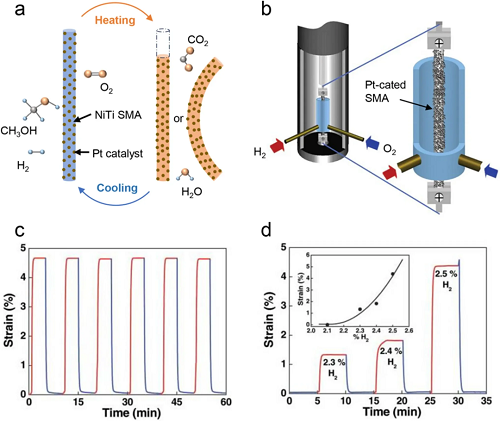
图4. 燃料驱动的热驱动镍钛合金线驱动器。
图5则进一步展示了液晶弹性体(LCE)等软材料在燃料热驱动下的应用。与SMA类似,LCE材料在受热时会发生向列相-各向同性相的转变,导致材料收缩。集成催化层的LCE致动器在接触燃料蒸气时,能够利用反应热自动发生弯曲或爬行运动,展示了其在软体机器人实现连续、自主运动方面的巨大潜力。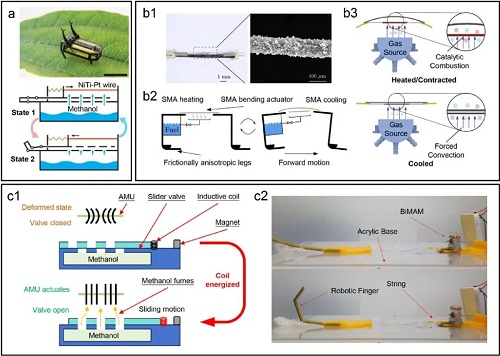
图5. 由燃料热机械驱动的人造肌肉的应用。
V 燃烧驱动产生气体的驱动技术:从爆发跳跃到微观游动
燃烧驱动:瞬时高能的爆发力化学燃料最显著的特性在于其极高的能量密度,利用这一点,图6描绘了基于燃烧瞬间爆发产生气体的软体机器人。这种3D打印机器人结合了内部刚性燃烧室与外部柔性硅胶外壳,利用甲烷或氢气爆炸性燃烧产生的瞬时高压气体,驱动半球形身体瞬间膨胀。这种机制完美诠释了燃料“高爆发”的优势,使得软体机器人能够突破材料刚度限制,实现数倍于自身身高的跳跃(如0.76米),特别适用于越障救援等对瞬间功率输出有极高要求的应用场景。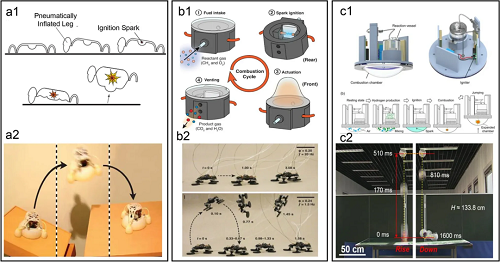
图6. 由燃料化学反应驱动的热气动执行器。
与燃烧释放的瞬时爆发力不同,为了实现更复杂的自主运动任务,研究人员利用温和的催化分解反应来构建可控的气动网络。图7 展示了该领域的里程碑式工作——全软体自主机器人“Octobot”。该系统利用微流控逻辑电路精确控制双氧水流向铂催化室,反应产生的氧气流直接驱动气动致动器,使触手交替弯曲从而实现自主游动。这一设计不仅摆脱了外部气源,还通过引入电化学气动电池(EPB)及热电控制策略,实现了对气体产生速率和压力的精确编程,为软体机器人的智能化控制提供了新范式。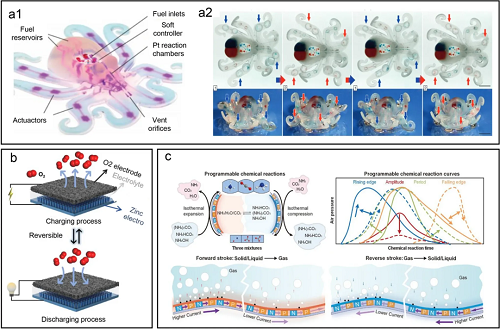
图7. 由燃料的化学反应提供动力的不产生热量气动驱动器。
通过将燃料产生气体驱动机制进一步拓展至微纳尺度,开启了微型机器人自主巡航的新篇章。图8聚焦于利用气泡反冲力推进的微型马达。无论是利用铂(Pt)催化分解双氧水驱动的纳米穿梭车,还是利用酶替代金属催化剂以提升生物相容性的Janus胶囊电机,本质上都是将化学能转化为微小的气泡动能。此外,利用镁(Mg)与胃酸反应产生氢气气泡的镁基微马达,不仅实现了在体内的自主运动,还兼具中和胃酸的治疗功能,展示了气体驱动技术在生物医疗与靶向递送领域的广阔前景。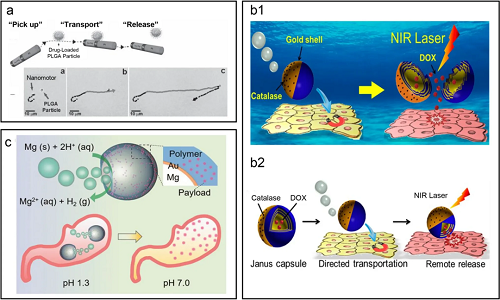
图8. 由燃料化学反应产生的气泡推动微型机器人。
VI 总结
本综述通过全面分析燃料驱动软致动器在原理、材料及应用层面的最新进展,强调了化学燃料作为高能量密度动力源在解决软体机器人“能源焦虑”问题上的关键作用。这为未来开发更高效、更自主、更微型的智能机器人系统提供了重要的理论参考和设计思路 。
作者简介

关于我们
Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中科院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
扫描上方二维码关注我们点击阅读原文/扫描上方小程序码在免费获取英文原文
胡兴好
本文通讯作者
江苏大学 教授
▍主要研究领域
(1)人工肌肉的研发与应用;(2) 软体机器人致动与控制;(3)机电控制一体化。
▍主要研究成果
胡兴好教授、博士生导师,2013年毕业于西安交通大学电气工程与自动化专业(钱学森实验班),获工学学士学位。2019年毕业于西安交通大学电气工程系,获工学博士学位;2016年10月-2018年11月受国家留学基金委资助前往美国德州大学达拉斯分校学习两年,师从国际著名纳米科学家Ray H. Baughman院士;2019年8月加入江苏大学机械工程学院,2019年3月-2020年7月,美国德州大学达拉斯分校博士后。中国机械工程学会高级会员,中国仪器仪表学会高级会员,国际仿生工程学会高级会员。获2021年陕西省优秀博士学位论文,2022年第九届江苏大学“十佳青年教职工”。2022江苏省科协青年人才托举工程,“MINE”优秀青年科学家等。2023年获评第9届中国科协青年人才托举工程,江苏省“333”第三层次人才。在电化学人工肌肉、碳纳米管纤维人工肌肉等方面取得了系统的原创性成果。在Science, PNAS, Advanced Materials, Advanced Functional Materials, ACS Nano等国际著名学术刊物上发表SCI论文18篇,其中第一作者及通讯作者17篇,总引用2000余次,H因子22。以第一发明人授权中国发明专利10余项,合作申请PCT及美国发明专利4项。
▍Email:huxh@ujs.edu.cn
撰稿:原文作者
编辑:《纳微快报(英文)》编辑部
关于我们
Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 江苏大学胡兴好等:自主微型机器人的关键突破—燃料驱动软致动器的新兴策略
 西工大黄河源&西交大赵鑫等综述:聚合物基柔性无线传感器——从材料设计到智能健康监测系统的全景综述
西工大黄河源&西交大赵鑫等综述:聚合物基柔性无线传感器——从材料设计到智能健康监测系统的全景综述 燕山大学杨成武/张新宇&泰国朱拉隆功大学秦家千等:自分离双相电解液打造电子富集界面,实现超长寿命水系锌离子电池
燕山大学杨成武/张新宇&泰国朱拉隆功大学秦家千等:自分离双相电解液打造电子富集界面,实现超长寿命水系锌离子电池 浙江大学于东旭、张雪艳、王利光:钠离子电池NASICON正极的结构、电化学与稳定性
浙江大学于东旭、张雪艳、王利光:钠离子电池NASICON正极的结构、电化学与稳定性 北理工马小霞&浙师大王英廷等综述:军用摩擦电纳米发电机的近期进展与关键挑战
北理工马小霞&浙师大王英廷等综述:军用摩擦电纳米发电机的近期进展与关键挑战