受生物启发的神经形态视觉传感器,其最新发展可以用3个关键词来概括:更小,更快,更智能。(1)更小:通过集成以前分离的组件(如传感器、内存和处理单元),使器件越来越紧凑。传感器内视觉计算已经展示出明显的优势,例如如电路简单,低功耗和较少的数据冗余。(2)更快速:更小、更集成的设备可以更快地检测、处理和响应输入。(3)更智能:基于以上研究方向,发展更加先进的应用,如自适应视觉传感器,碰撞传感器和伤害感受传感器。本文主要综述了基于近传感器和传感器内视觉计算的两种神经形态视觉传感器,包括其最新进展、工作机制、图像预处理技术及先进特征。
1. 使用光电突触电路和单器件光电子突触,实现近传感器和传感器内计算的神经形态视觉传感器。
2. 本文重点综述了基于近传感器和传感器内视觉计算的神经形态视觉传感器,其最新进展、工作机制和图像预处理技术。
韩国成均馆大学Yong-Hoon Kim与韩国中央大学Sung Kyu Park在本文中首先重点关注了神经形态视觉传感器在自动驾驶汽车、智能机器人和移动电子设备等机器视觉计算系统中的最新进展。然后概述了光电突触电路(OSC) 的材料设计、设备架构和操作机制,以及在视觉信息的近传感器计算处理器中的应用。随后详细介绍了传感器内计算处理器的单元操作系统(OS),其材料设计、设备架构和操作机制。最后回顾了神经形态视觉传感器超越传统功能和成像的挑战性演变,并简要总结了神经形态视觉传感器的发展现状、存在问题和应用前景。
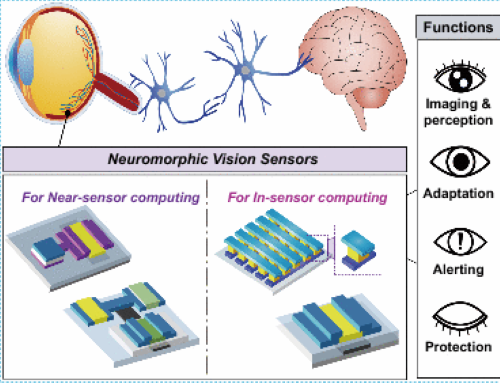
开发先进的光电视觉传感器,实现视觉信息的高级图像识别和数据预处理,将加速机器视觉和移动电子产品的进步。与包括模数信号转换和数字逻辑计算任务(即冯·诺依曼计算)在内的传统感官计算方法相比,神经形态视觉计算,通过最大限度地减少前端光电传感器和后端后处理器之间不必要的原始数据传输(图1),来提高能源效率和数据处理速度。神经形态视觉传感器通常用于神经形态视觉计算任务,例如去噪、边缘增强、光谱滤波和视觉信息识别。根据是否可以进行原位预处理,可以分为近传感器和传感器内计算处理器两种方法。近传感器中,用于捕获视觉信息的图像传感器和用于预处理捕获图像的内存计算处理器是分开存在的,内存计算处理器可以基于模拟内存函数,同时执行内存和计算任务。用于传感器内计算的神经形态视觉传感器可以与单元件图像传感器一起构建,从而在同一设备中接收视觉信息和执行内存计算。这是人工智能机器和移动电子设备中未来视觉计算系统的理想状态。
用于近传感器和传感器内计算的神经形态视觉传感器,分别使OSCs和OSs来实现(图2)。OSCs专为近传感器视觉计算而设计,通过互连一系列离散的功能单元,如光电传感器和电突触(ESs)构建而成。ESs是执行内存、计算任务,以及提高图像处理中数据处理速度和功耗效率的重要组件,用于内存计算的人工突触必须具备电导切换能力、模拟存储状态,使用正负偏置尖峰增强和抑制电导更新。模拟存储器的功能可以根据短期可塑性、长期增强、长期抑制、成对脉冲易化、成对脉冲抑制、脉冲时间依赖性可塑性、脉冲数量依赖可塑性和脉冲频率依赖性来评估。ESs通常使用双端忆阻器和三端晶体管器件结构产生。忆阻器具有高密度阵列、简单的制造工艺和高编程速度等优势,晶体管型ESs则具有节能计算、器件性能均匀、无损读数、线性/对称电导开关和高循环稳定性等优点。操作系统最初用作光电内存计算硬件,利用光信号来调制传导状态,近期,操作系统作为传感器内计算的神经形态视觉传感器,引起了人们的关注。不同的器件架构,使操作系统具有独特的光学响应和电导切换功能。对于忆阻器型操作系统,光响应层位于透明导电顶部电极(TE)和金属底部电极(BE)之间,而对于晶体管型OS,光响应层主要位于源极和漏极之间的通道区域,额外的栅极用于设计电导切换性能。
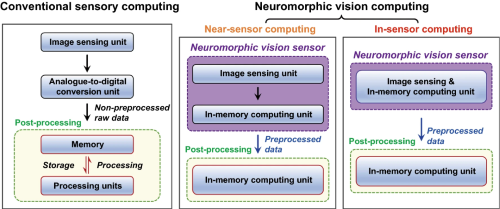
图1. 传统感官计算和神经形态视觉计算的图像处理流程。
II 用于近传感器视觉计算的神经形态视觉传感器
用于近传感器视觉计算的OSCs可以通过互连一系列离散的功能单元来构建。传统视觉感官计算中,光电传感器和光伏换能器在OSCs中可以互换,大大减轻了开发神经形态视觉传感器的负担。在传统的传感系统中,采用基于逻辑的计算单元和数字存储单元,处理所采集的图像信息,然而,在OSCs系统中,具有内存计算功能的单个人工ES可以取而代之,提高处理视觉信息时的数据处理速度和功耗效率。
图2. 生物启发的神经形态视觉传感器;以近传感计算方式工作的光电同步电路(OSCs)和以传感器计算方式工作的光电突触(OSs)。
2.1 使用光电突触电路的神经形态图像感知
OSCs可以通过一系列近传感器计算过程,演示神经形态图像识别,包括光电传感器中的图像传感,光伏传感器中的光偏置控制,以及人工ESs中的偏置驱动内存计算。当来自入射图像的光学信息,到达每个像素的单个OSC时,光电传感器的光驱动电导发生变化,并在光伏换能器中转换为偏置信号。然后,ES根据偏置峰值的频率和强度经历历史模拟电导切换,最后,映射位于每个像素中的ESs的开关电导值,神经形态视觉感知获得精细化的图像,以提高计算速度和功耗条件。
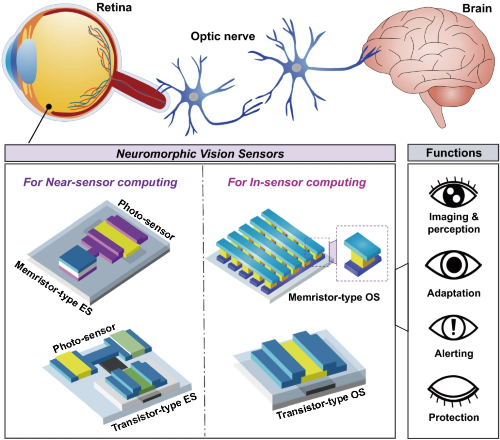
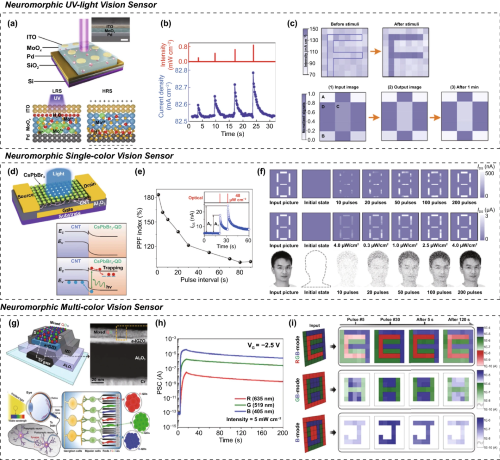
图3(a)报道了一种能够对紫外线(UV)光图形进行神经形态感知处理的OSC,OSC暴露在紫外光下时,随着光引起的In₂O₃电导率的瞬态变化,光电传感器的电压迅速下降。相反,在阈值以上为忆阻器提供足够的剩余电压,Ni CF的形成和增长,则能够诱发模拟开关和忆阻电导率的非挥发性更新(图3b)。在每个像素处绘制忆阻电阻的电导值,神经形态视觉传感器阵列可获得入射紫外线图像精细的视觉数据(图3c)。
然而,由于In₂O₃半导体具有比可见光更宽的带隙,此方法无法检测彩色图像信息,不利于多种图像的识别。为了克服这个问题,研究人员努力开发可用于彩色图像数据近传感器器计算的OCSs,发现颜色敏感的光电传感器,与非颜色敏感的神经视觉传感器相互连接,可以实现颜色敏感的神经形态视觉传感器。图3(d)报道了一种使用颜色响应光伏分压器和晶体管型ES制作的颜色感知OSC,设计了一种类似于逆变电路配置的高级OSC,并将光传感器、负载电阻和人工突触安排在适当的位置,根据光电传感器和负载电阻之间的电导率比率,输出电压从光伏分压器转移到晶体管型ES栅极端的输出电压电极区域(图3e),可以成功感知高光强的绿色,并记录在专为近传感器计算设计的颜色响应OSC中(图3f)。然而,仍然存在零件多,制造工艺复杂,器件密度低等问题。对于高分辨率和片上神经形态视觉传感,垂直集成比平面集成更有优势,用更小尺寸的芯片制作神经形态视觉传感器,仍需先进的处理技术和设备架构。
图3. 近传感器计算系统OSC;电路配置与神经形态视觉感知;神经形态紫外线(UV)光视觉传感器。(a) 由光传感器和忆阻式电突触(ES)组成的电路原理图;(b) 忆阻电阻的电导切换行为及其工作机理;(c) UV光蝶纹图像的神经形态感知,神经形态色觉传感器;(d)由光传感器、负载和晶体管型组成得ES电路原理图;(e)光电分压器的光偏转换性能;(f) 颜色和近红外(IR)图像的神经形态感知。
2.2 基于电突触的神经形态记忆计算
人工突触可用于内存计算的硬件处理器,例如,用于同时存储和计算输入数据。采用生物信息计算方法的人工突触,可以显著提高大量非结构化数据(如图像,视频,声音和语言)的信息处理的计算速度和功耗效率。许多基于忆阻和晶体管器件结构的人工突触已经稳步发展,如前所述,在OSCs中,人工ESs器件是图像信息成像和预处理中最重要的部分。
2.2.1 晶体管型电突触
所有晶体管型ES都包含传统的晶体管,包括绝缘栅电介质、半导体通道和导电三端电极(图4)。然而,每个晶体管类型的ES都由独特的材料和器件设计而成,使用电偏置编程方法执行电导切换和模拟电导更新功能。根据晶体管型ES的工作机理,可分为电解质、浮栅(FG)和铁电型ESs。
2.2.1.1 电解液晶体管型ES
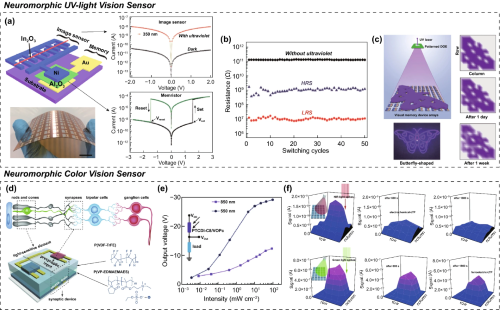
通过溶液工艺,将移动阳离子掺入绝缘基质中合成电解质,并将此具有高电容的电解质引入电介质区域,制造电解质晶体管型ES。通常使用半径小的移动阳离子,例如,质子,碱金属和碱土金属离子(Ca²⁺和Mg²⁺)。根据基质相,电解质可分为液体、凝胶和固体电解质。正偏置输入施加到栅极端时,电解质中的移动阳离子开始漂移到电解质/通道界面(图4a)。移动阳离子积聚在电解质/通道界面附近,分布不均匀并产生浓度梯度。在n型通道晶体管中,随着电子双层的形成和电化学掺杂反应,顺序累积的金属阳离子产生兴奋性变化,由于移动阳离子的浓度梯度消散需要一定的时间,即使不再施加偏置,更新的传导状态也会保持很长时间。当施加相反的偏置输入时,积累的移动阳离子则逐渐恢复到原始的均匀状态。由此可知,抑制电导开关可以通过在栅极端施加极性相反的编程偏置尖峰来实现。
调查显示,流体离子液体和粘性离子凝胶型电解液可用于制备电解液晶体管型ESs,水溶剂和凝胶聚合物作为离子液体和离子凝胶电解质的基质。图4(b)展示了使用1-乙基-3-甲基咪唑双 (三氟甲基磺酰基)亚胺(EMIM-TFSI)和水溶剂的离子液体晶体管型ES,由于MoO₃和质子之间的电化学掺杂反应,n型MoO₃半导体的电导率可以通过兴奋性(抑制性),更新调节到更导电 (电阻) 的状态。图4(c)报道了由EMIM – TFSI和凝胶基质组成的离子凝胶晶体管型ES,凝胶的机械灵活性使其能够在塑料衬底上,可靠地制造和操作。灵活的内存计算设备使来自人手的触觉信息可以直接预处理,而不需要外部计算机设备的帮助。
然而,液体和凝胶电解质因其流体和粘性的机械特性,难以制造高密度的器件阵列,而且易于化学修饰,难以确保操作稳定性。为了应对这些挑战,研究人员积极探索含有绝缘固体基质的固体电解质,如聚乙烯氧化物(PEO)、二氧化硅(SiO₂)和氧化铝(Al₂O₃)。在实践中,使用固体基质和移动阳离子结合的固体电解质,开发了各种电解质晶体管型ESs。例如,图4(d)展示的一种一种全固态晶体管型ES,使用无机固体电解质,包括无机SiO₂和Li⁺阳离子。
图4. 电解质晶体管型ES。(a) 运行机制;(b) 离子液体电解质基晶体管型ES ;(c) 离子凝胶电解质基晶体管型ES;(d) 无机固体电解质基晶体管型ES。
2.2.1.2 FG晶体管型 ES
FG晶体管具有稳定的电导切换和长期保持特性,因此成为晶体管突触的最广泛使用的架构。通过垂直叠加厚块状介质、金属光纤、超薄隧穿介质和半导体通道,可以制备出FG型晶体管ES(图5a),金属FG区域是通道电导切换的关键部分。不同极性的电偏置尖峰,可以作为存储器计算任务的激励性和抑制性电导切换的编程源。当在栅极端施加负(正)偏置时,电子(空穴)通过Fowler–Nordheim隧穿过程从FG注入通道区域,因此,随着多数载流子的增加, 通道电导可以通过兴奋性更新,被调制到更导电的状态。相反,当施加正(负)偏置编程输入时,n型(p型)通道区域中的大多数载波移动到FG区域,半导体通道随着多数载流子的减少,表现出更强的电阻,从而实现抑制编程。
对于非易失性存储,使用低维材料,FG中积累的电荷通过内部泄漏路径,损失较少。例如,Au,Pt和Cu等贵金属,在器件制造和操作过程中具有低化学变形性,此外,在FG和通道层之间需要超薄隧道层和宽带隙绝缘体(例如,SiO₂, Al₂O₃和TiO₂)来长时间保持调制电导,然而,在金属纳米材料表面形成均匀的超薄隧道层十分困难。为了解决这些问题,一些研究提出使用容易在其表面生成超薄氧化层的材料。图5(b)报道了一种FG区Al-Al₂O₃ (Al NPs)核壳纳米粒子晶体管型ES,由于Al NPs和通道层之间具有易氧化性,可以自发形成均匀的超薄Al₂O₃隧道层,Al NP FG和InGaZnO (IGZO)之间的电子带对齐,以及IGZO的n型半导体性质,使器件可以通过负偏置和正偏置编程输入,调制成更导电性和电阻性的状态。
2.2.1.3 铁电晶体管型ES
具有自发电极化能力和多域的铁电材料,可以实现非易失性模拟存储器功能,因此铁电晶体管型ES可以通过将铁电材料引入栅极电介质区域制造。当栅极端施加电偏置尖峰时,部分随机定向的铁电区域开始沿外加电场的方向排列(图5c)。通过改变铁电膜的极化,可以逐步更新通道导电性。当施加正(负)栅极偏置尖峰时,n型半导体通道显示通道电导逐渐增加(减少)(图5d)。由于铁电材料的自发电极化,可以保持更新的通道电导。与之相反,p型半管通道表现出具有正(负)电编程信号得渐进抑制(兴奋)调制行为。
图5. 浮动栅(FG)晶体管型ES (a) 运行机制;(b) Al纳米颗粒(NPs) – FG晶体管型ES ;(c) 铁电晶体管型ES合作机制;(d) 聚偏氟乙烯-三氟乙烯(VDF – TrFE)铁电晶体管型ES。
2.2.2 忆阻型电突触
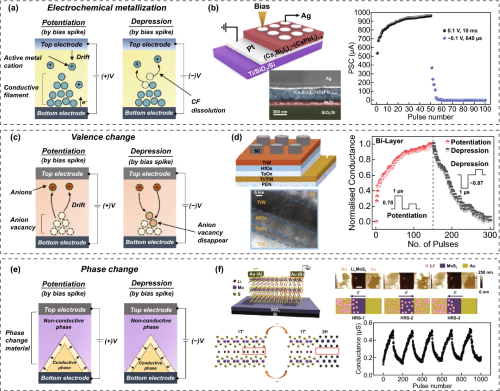
忆阻器型ESs具有简单的双端器件配置,由上下区域的独立电极和中间区域的有源层组成。然而,每种类型的忆阻器型ES都有其独特的运行机制,根据作用机理,可分为电化学金属化(ECM)、价态变化(VC)和相变(PC)忆阻器型ES。
2.2.2.1 ECM 忆阻器ES
ECM忆阻器型ES可以通过在每个侧电极上引入活性和惰性金属,并在有源层中引入绝缘或半绝缘电介质来制造(图6a),电化学氧化还原反应产生的CFs的生长和破裂是导致电感开关行为的主要原因。图6(b)报道了一种使用无机钙钛矿活性层的ECM忆阻型ES,(Cs3Bi2I9)0.4–(CsPbI3)0.6钙钛矿活性层和聚甲基丙烯酸甲酯(PMMA)绝缘层,在Pt BE和Ag TE之间叠层,通过Ag阳离子型CFs的ECM机制表现出基本的突触行为,通过应用正脉冲和负脉冲,演示了电增强和降低操作。
在TE和BE电极上使用惰性金属(如Pt, TiN和Au)或导电氧化物(如InSnO (ITO)和InZnO (IZO))(图6c),制造VC忆阻器。图6(d)报道了一种使用HfOx/TaOx双层膜的VC忆阻型ES,表现出正偏置脉冲和负偏置脉冲刺激下的突触增强和抑制行为。
PC材料的可逆电阻-导电相变特性是PC忆阻型ESs的主要开关原理(图6e),PC忆阻型ES通过在两个金属电极之间引入相变材料来制备,其导电性可以通过使用电偏置输入,控制导电和电阻相的部分来调节。对于含锂的MoS₂, MoS₂的1T和2H相分别表现出导电和半导体性能(图6f)。通过施加电偏置,将锂电化学插到2H相中,可以形成1T相,通过施加正偏置脉冲和负偏置脉冲,MoS₂器件的电导可以逐渐增加和减少,从而产生增强和抑制行为。
图6. 忆阻器-类型ESs;器件配置、操作机理和电导开关性能。(a) E切换忆阻型ES运行机制;(b) 钙钛矿基ECM忆阻型ES;(c) VC忆阻型ES工作机理;(d) 氧化基VC忆阻型ES;(e)PC忆阻型ES操作机理;(f) 过渡金属二卤代胺(TMDC)基忆阻型ES。
III 利用光电突触的神经形态图像感知
最初,OSs作为一种利用光信号实现光电存储计算得设备而开发的,具有信号传输速度快、带宽宽的优点。然而,近年来,OSs作为一种可用于视觉数据的传感器内计算的神经形态视觉计算处理器,受到越来越多的关注,可以在同一设备上同时执行图像接收和内存计算任务。如今,研究人员已经开发了几种创新的OS型神经形态视觉传感器。
3.1 利用光电突触的神经形态图像感知
图像数据视觉计算过程中,一体化神经形态视觉传感器,应该做到同时执行图像传感和神经形态内存计算任务,因此,必须包括用光传感器、电导切换和模拟更新功能的功能区域。当视觉信息到达操作系统阵列时,每个具有光吸收站点的操作系统都会经历通道电导的变化,并在光输入结束后,可以保持瞬态电导的变化。此外,由于存在模拟电导状态,改变的电导状态可以通过后续的图像曝光进一步更新。通过映射OS阵列更新电导值,可以捕获事件图像,并将其转换为更精细的图像。
图7(a)使用具有ITO/MoOₓ/ Pd肖特基二极管结构的忆阻型OS制作了一种能够在传感器内生成UV光图像的新形态视觉传感器,可以在重复光照下表现出紫外光驱动的电导切换功能和激发电导更新行为(图7b),通过读取操作系统阵列中单个设备的开关传导状态,识别原始图像。此外,在神经形态视觉预处理过程中,对入射图像进行迭代识别,将图像灵敏度和噪声最小化,可以获得精细化良好的图像(图7c)。图7(d)提出了一种神经形态视觉传感器,使用具有异构通道(HC)结构的晶体管型OS,根据光强和曝光周期,更新为不同的电导状态(图7e)。此外,识别输入图像时,晶体管型操作系统显示出更优越的光敏成像能力,即使在微弱和模糊的图像模式下,也能够清晰地识别图像(图7f)。这项工作为使用操作系统作为一体神经形态视觉传感器提供了良好的基础。
然而,由于CsPbBr₃ QD光吸收器(主光波长516 nm)光敏感光谱范围有限,其操作系统难以区分和识别各种彩色图像。为了解决这个问题,图7(g)报道了一种使用HC结构制作的逐色操作系统,包括一个多色响应QD层,基于QD/IGZO的混合操作系统表现出多色响应电导开关特性(图7h),并且可以根据用户的意图,选择性地识别和从输入图像中提取所需图像(图7i)。
图7. 传感器计算系统的操作系统,器件配置,以及神经形态视觉知觉。(a) 神经形态紫外线视觉传感,忆阻型操作系统的装置原理图;(b) 光驱动电导切换行为;(c) UV光模式图像的成像和预处理;(d) 晶体管型OS的装置原理图;(e) 光驱动电导开关行为;(f) 单色图案图像的成像和预处理;(g) 神经形态多色视觉传感器晶体管OS的装置原理图;(h) 颜色驱动电导切换行为;(i) 混合颜色图案的成像和预处理。
大多数晶体管型操作系统都包含绝缘栅极电介质、半导体通道和导电三端电极结构。迄今为止,已经设计了三种具有独特光响应区域的基于晶体管的操作系统:HC、FG和非化学计量半导体通道(NSC)。
3.2.1 HC晶体管型OS
HCs由光吸收剂、高迁移率半导体导管和异质界面区组成,用于光接收、电荷传输和光电荷存储(图8)。HC构造可分为跨型(I型)、锯齿型(II型)和破碎型(III型), II型HC有利于电子-空穴对在异质界面处的高效分离和分离光电荷的稳定存储(图8a), 因此,许多晶体管型操作系统都是用II型HC制造的。当光信号到达光吸收体时,由于II型异质结构的存在,EHPs在光吸收体中形成,并在光吸收体与高性能半导体层之间的界面处自发分裂为光电子和光空穴。每个光电荷被困在不同的层中,光电子和光空穴可以保持很长时间而不需要重组,因此,可以通过光学编程输入将通道电导更新为更导电的状态(图8b)。然而,不同光谱或不同强度的光信号结合电偏置信号才能可逆地降低通道电导。一些研究人员已经开始关注开发全光驱动的操作系统,图8(c)制造了一个光电电路,由一个光伏分压器(CdSe光电传感器和IGZO负载晶体管)和一个CdS/ IGZO HC型OS组成,通过绿光和红光编程信号更新为更导电性和更阻性的值(图8d)。当CdSe光电传感器的电阻因红光输入而暂时降低时,光伏分压器向HC型OS栅端的电压输出电极传递正偏置,传递的正偏置幅值取决于CdSe光电传感器和IGZO负载电阻之间的电阻比。红光编程输入从光伏分压器转移到HC型OS的门端的正偏置,释放CdS/IGZO异质界面附近积累的光电荷,能够降低OS的通道电导(图8e)。
图8. (a) HC晶体管型OS;(b)工作机理,光学增强和电压抑制特性;(c)电路原理图;(d)绿光诱导的增强和红光诱导的通道电导降低;(e)运行机制。
FG晶体管型OSs可以通过垂直堆叠厚阻塞介质、光响应半导体光纤、超薄隧道介质和比光纤更宽带隙的半导体通道来制造(图9a),利用光学和电气,在内存计算过程中进行兴奋性和抑制性电导调制。图9(b)展示了一种基于BP量子点的FG OS,包括BP量子点(光活性FG)、厚Al₂O₃(阻塞介质层)、薄Al₂O₃(隧道介质层)和n型MoSSe半导体通道,该装置能够实现颜色驱动的增强和偏置驱动的抑制功能,并显示出在内存计算方面的巨大潜力(图9c)。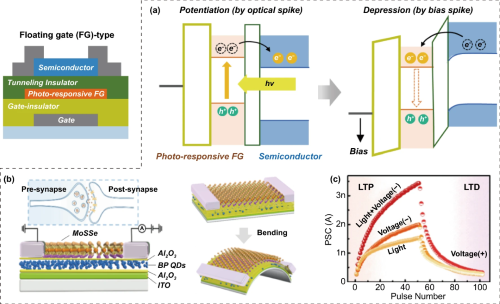
图9. FG晶体管OS。(a) 运行机制;(b) 黑磷(BP)量子点(QDs) – FG晶体管型OS ;(c) 光增强和电抑制特性。
3.2.3 NSC晶体管型OS
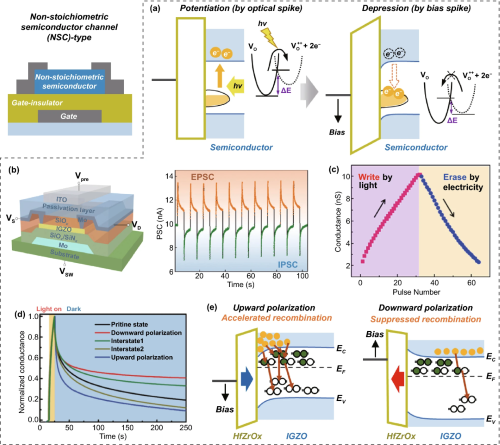
化学计量半导体由于直接的带跃迁和重组动力学,表现出超快的光学响应和自发衰变特性。具有stoi – chiometric成分的半导体通道优越的传导路径和高效的磷电荷生成动力学,优先用于超敏晶体管型光传感器,而具有大量点缺陷的NSC半导体在光输入信号下表现出缓慢的电导跃迁和非易失性调制行为,因此,更适合制作晶体管型操作系统。多种方法可以获得具有多点缺陷的NSC半导体,例如,在晶体和非晶半导体材料的间隙和位移位置加入外部元素,人为地引入点缺陷,晶材料由于其松散耦合的成分网络,固有地包含许多可光电离的点缺陷态。因此,在通道区域使用具有点缺陷的非晶半导体,可以很容易地制造NSC晶体管型操作系统。
目前为止,研究人员已经报道了一种能够光驱动电导更新和通过在通道区域使用非晶态氧化物半导体(AOSs)进行多比特编程操作的跨连接器型操作系统,在光输入下,VO诱导的深阱态分解为光电子和带正电的单/双荷氧空位离子(图10a)。图10(b)报道了一种基于AOS的OS,在栅介电区域,具有SiO₂/SiNx的电荷捕获结构。采用微弱的电编程信号,通过电荷捕获区域的有效复合作用,可以很容易地去除通道区域中产生的伪电荷,从而实现线性和对称电导更新图10(c)。
其次,一般来说,基于AOS的操作系统表现出不稳定的光编程通道电导保留,并具有逐渐衰减的行为(图10d)。研究人员设计了一种铁电辅助的AOS基OS,该OS在栅极介质区引入铁电HfZrOx层,以实现光学程序通道导电性的长期非挥发性存储特性,可以根据铁电层的极化方向来控制光学编程通道电导状态的长期保持行为(图10d),HfZrOx向下极化,可以显著抑制IGZO通道中光电子和电离氧空位之间的重组反应(图10e)。
图10. NSC晶体管型操作系统;(a) 运行机制;(b) 光增强和电抑制特性(c) 线性电导更新行为;(d) 光学程序电导状态的保持工程;(e) 取决于铁电HfZrOx极化方向的作用机理。
关于忆阻器型OSs,肖特基势垒(SB)型和光控忆阻器型操作系统已得到广泛开发。它们具有简单的双端器件结构,在透明导电TE和金属BE之间具有光响应活性空间。
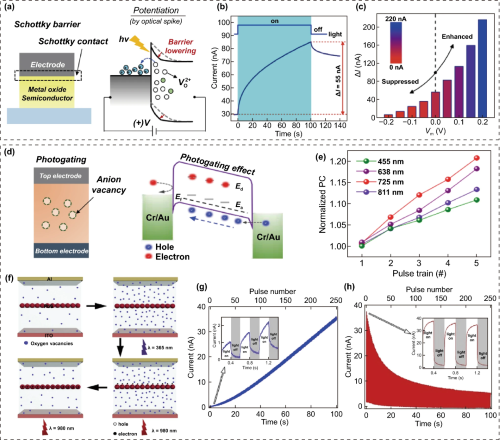
3.3.1 SB忆阻型OS
SB忆阻型操作系统在半导体活性层和导电TE之间存在肖特基接触,在活性层和底部金属电极之间有欧姆接触(图11a)。在初始状态下,使用半导体氧化物材料作为活性层区域,在肖特基结中形成高SB和宽损耗区,表现出低导态。器件暴露在光尖峰下时,通过光电离过程,在半导体氧化物层中产生光电子和带电氧空位,有助于产生兴奋性电导更新(图11b)。图11(c)利用ITO和Nb掺杂SrTiO3,演示了基于肖特基结结构的人工OS,在光学编程尖峰下可以表现出激发性电导开关动力学,在对ITO TE施加正调制偏置的同时,用光照射器件可以使更多的氧空位发生光电离,从而在降低肖特基结的势垒高度的同时,产生更强的电导率跃迁。
3.3.2 光电门控忆阻型OS
光致忆阻型操作系统通常具有空间电荷区域,如在有源层内的局域子间隙位点和/或异质性空间。图11(d)报道了使用p型半导体SnS的光控忆阻型操作系统,包括活性区域的阳离子和阴离子空位,SnS的带隙很小,该器件表现出颜色可编程的内存计算行为(图11e)。图11(f)报道了一种使用PbS量子点(QDs)和n型ZnO薄膜制作的光致忆阻型OS,在紫外光照射下(λ= 365 nm),ZnO层的Vo被光离子化,并作为局部带正电的光门位点,导致导电性逐渐增加(图11g),在红外照明(λ= 980 nm)下,PbS QDs产生的光电子迁移到ZnO层,中和电离的VOs,抑制电导率调制(图11h)。
图11. 忆阻器OSs型器件配置、工作机理及光电电导开关性能。(a) 运行机制;(b) 光学增强作用;(c) 采用偏置调制的电导开关性能工程;(d) 运行机制(e) 具有氧空位和量子点的全光调制光门忆阻型OS ;(f) 运行机制;(g) 紫外线驱动的增强作用;(h) 红外光线驱动的增强作用。
最近,研究人员正在积极开发更进一步的机器视觉的神经形态视觉传感器的功能和成像水平。包括自适应识别、焦点识别和选择性焦点接收等源自卓越的生物视觉识别系统的传感器,以及用于决策的神经形态视觉传感器,如避免碰撞、伤害性运动和伤害感受性保护。
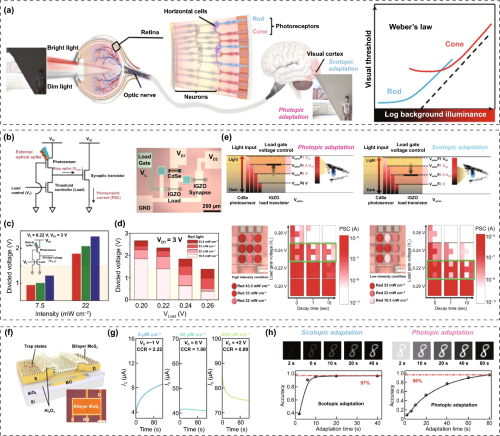
人类视网膜作为生物图像检测器,由生物细胞组成,如光感受器 (视杆细胞和视锥细胞)和水平细胞(图12a),其中,锥细胞和视杆细胞分别负责入射光的颜色感知和对比度传感。与目前的电子图像探测器相比,生物光感受器具有较低的光检测动态范围,不利于高分辨率图像的识别。人类视网膜由于视觉适应功能可以在更宽的光范围 (从更暗到更亮)下清楚地识别物体,在不同光环境中,生物视觉适应有两种情况:明视觉适应和暗视觉适应。模仿生物视觉适应,即视网膜的灵敏度自动调整适应周围的光环境,是目前使用电子图像传感器构建具有更宽检测范围和更准确识别的先进图像传感系统的关键。
近期,研究人员努力构建能够适应环境光环境的神经形态图像传感器。报道了一种由用于光传感的光伏分压器和用于内存计算的晶体管型ES互连构建的OSC(图12b),光信号在光伏分压器中转换为偏置信号,转换后的偏置信号传输到晶体管型ES的栅端(图12c),由于移动的Na离子对半导体通道的电化学掺杂,偏压尖峰诱导了通道电导率的非挥发性调制。
一般来说,对于带有大量环境噪声的明亮图像,由于像素中每个晶体管型ES的通道电导,不断地更新,很难检测到精确的图像。而对于低强度图像,由于像素中所有晶体管型ESs的通道电导,很少超过阈值(图12d),同样很难检测到图像。通过控制负载门偏置切换视觉适应模式,可以在相同的光刺激下,实现偏置尖峰的振幅整体上的增加或抑制(图12e)。
通过使用习惯性视觉处理,引入类似脉冲的负载偏置,可以在神经形态图像传感器中实现更精确的图像预处理和自发恢复。电路型神经形态图像传感器可以通过其自适应功能,在宽动态范围内实现高性能图像识别。然而,挑战性仍然存在,例如,多个组件集成过程复杂和低像素密度。为了克服这些问题,研究人员开发了基于OS的神经形态视觉传感器,能够通过引入自适应功能,来提高图像识别性能。图12(f)开发了具有环境自适应图像传感能力的MoS₂光电晶体管,在栅端施加恒定的栅偏压,可以激活视觉适应模式,改变栅偏压值可以转换自适应性能(图12g),更适合在昏暗的光线环境下检测黑暗图像(图12h)。
图12. 适应环境的神经形态视觉传感器。(a) 由杆状细胞和锥状细胞组成的适应环境的生物视觉系统(韦伯定律,光位和暗位适应) ;(b) OSC型环境适应神经形态视觉传感器电路原理图;(c) 光伏分压器的光偏转换性能;(d) 通过负载门电压控制来改变光适应模式;(e) 光位和暗位适应模式的图像感知;(f) OS型环境适应神经形态视觉传感器设备示意图;(g) 通过负载门电压控制来改变光适应模式;(h) 光位和暗位适应模式的图像感知。
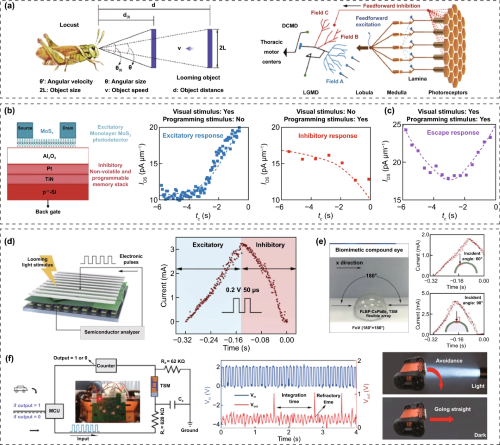
生物视觉系统作为生物近距离检测器,通过测量从物体反射的视觉信息中光信号的频率、强度的变化,来识别与物体的距离。基于相似检测功能,人类视觉系统可以执行先进的成像和决策任务,例如,避免接近的动态物体的碰撞和静态物体的立体和焦点图像检测等。为了避免碰撞,生物接近识别系统采用一些方法来估计与接近物体的近似距离,例如,人眼使用双目视差原理感知与物体的距离、昆虫拥有由几个晶状体组成的复眼,能够观察到更为广阔的视野,然而,昆虫眼睛之间的距离太短,不能使用具有双目视差的人体距离识别方法,因此,根据物体接近复眼的速度估计距离(图13a)。昆虫视觉系统中的碰撞监测神经元,兴奋性突触响应接近物体的角速度,抑制性突触响应接近物体的角大小,可防止近物碰撞伤害。
图13(b)报道了模拟接近识别的神经形态碰撞感知器,以及昆虫视觉系统中避免碰撞的自动配对决策方法。使用MoS₂半导体通道和FG器件结构,能够对通道传导状态进行光激发和电抑制更新,通过监测神经形态碰撞传感器电导最大峰值的出现,可以确定碰撞何时接近(图13c)。图13(d)展示了一种自主避碰系统,使用忆阻型OS和峰值神经元电路形式,由Ag TE、BP-CsPbBr₃钙钛矿QD (FLBP-CsPbBr₃)异质材料和ITO BE)组成,能够对电偏置尖峰的前馈刺激产生兴奋性反应,并对从靠近物体反射光的前馈刺激产生抑制性反应,碰撞的关键时刻可以产生一个最大的电流峰值。通过将碰撞传感器阵列集成到圆形聚二甲基硅氧烷透镜上,实现了全方位碰撞检测(图13e),最后,利用忆阻式碰撞传感器和峰值神经元电路成功地演示了具有自动避碰决策功能的机器人汽车(图13f)。
图13. (a) 生物避碰系统;(b) 使用MoS₂光电探测器和FG晶体管型ES的神经形态碰撞传感器,用于碰撞感知的光驱动展示和偏置驱动抑制功能的设备原理图;(c) 避碰决策的表征曲线;(d) 使用忆阻型OS的神经形态碰撞传感器,(e) 放置在复眼上的碰撞传感器的位置依赖碰撞检测性能;(f) 使用神经形态碰撞传感器和Arduino微控制器构建的避碰系统的概念证明
4.3 神经形态痛觉传感器
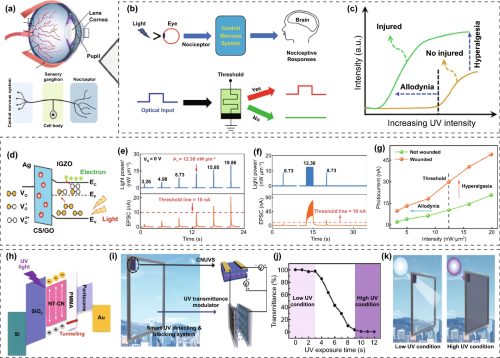
为了在日常生活中保护人体皮肤和器官(特别是眼睛),有必要对紫外线、辐射等有害信号进行检测。然而,因为紫外线无法肉眼可见,很难立即识别出潜在的损伤。最近,几项研究报道了用于模仿痛觉生物痛觉的人工神经形态痛觉传感器,检测并将有害刺激传递到中枢神经系统(图14a,b)。图14(c)展示了致敏作用,并扩展到了异位痛和痛觉过敏。VO的光离化可触发持续的光电导现象,进而触发神经元的光突触功能(图14d),痛觉感受器的通道电导还可以随着光刺激强度的增加而增加(图14e)。此外,痛觉感受器可能因刺激累积而受损,在亚阈值刺激强度下,可能实现疼痛知觉,而在高于阈值强度的刺激下,反应水平也会增加(图14f),即异位痛和痛觉过敏行为(图14g)。图14(h)提出了一种使用紫外线光响应的神经形态痛觉感受器和紫外线透过率调制器的紫外线光阻断窗口系统,在紫外刺激下(λ= 365 nm), C3N4层捕获光生电子,起到负光门的作用,从而提高p型并五苯的通道电导率,同时,调制器的紫外线透过率,可根据感受器所提供的可变偏置而改变(图14i)。因此,概念验证表明,与紫外线透过率修正器集成的神经形态伤害感知系统,可以监测有害紫外线,并在超过阈值时自动阻挡紫外线(图14j,k)。
图14. 神经形态疼痛传感器。(a) 生物(b) 仿生痛觉感觉系统(c)痛觉异位痛、痛觉过敏行为的原理;(d) 金属氧化物基光子伤害感受器能带结构及工作机理;(e) 光强相关阈值行为;(f) 基于强度和脉冲数的阈值行为;(g) 异位痛和痛觉过敏特点;(h) 使用神经形态光传感器和紫外线透过率调制器的智能系统的能带结构及工作机理;(i) 防紫外线智能窗系统;(j) 系统的紫外线透过率;(k) 系统概念的示意图。
V 前景
本文综述了神经形态视觉传感器的最新进展和先进功能应用。尽管基于OSC和OS的神经形态视觉传感器已经取得了显著进展,但仍然存在一些主要问题和挑战,需要进一步研究。
在OSCs中,光电传感器和内存计算处理器的平面和垂直串行帧模式,广泛用于从光电传感器捕获视觉信息后,间接调制相邻ES的电导。然而,存在零件数量过多、制造工艺复杂和器件密度低的问题。紧密设计单个组件和整体电路集成、发展精密的制造技术,可实现更高的分辨率和更小的芯片尺寸。此外,当光尖峰反复入射到OSC中的光电传感器上时,在高频光学尖峰条件下,元件之间的阻抗不匹配,导致信号丢失的现象更加明显,从而信息损耗、噪声将导致成像任务失真、图像识别精度低。因此,在未来,OSC型神经形态视觉传感器中功能部件之间的阻抗匹配设计对于高频图像信息处理至关重要。
操作系统具有高密度制造、更短的数据处理路径和更少的组件,在高分辨率和快速图像预处理方面具有优势。然而,由于操作系统是一体化设备,因此很难同时优化光反应性、光谱选择性、电导率持续时间和功耗效率。因此,对于神经形态图像预处理任务,包括对比度增强、噪声抑制、快速识别和光谱选择性等,必须不断进行材料发现、器件结构设计和自供电操作等方面的研究。目前主要采用纳米材料,但纳米材料不利于器件稳定性和均匀阵列生产,而晶体管类型的外壳很难开发高分辨率的神经形态视觉传感器,因此,有必要开发高密度制造技术(如电子束、纳米植体光刻)和设计更精细得器件结构(如纳米隙、垂直和三维通道结构)。
迄今为止,许多神经形态视觉传感器都建立在刚性基板上,仅仅关注视觉信息的神经形态处理的演示和性能优化。然而,要实现眼形弯曲视觉系统、可穿戴或皮肤修补或植入式光电系统和软机器人,神经形态视觉传感器必须制作在灵活或可拉伸的基板上。继续开发研究以实现自由形式的神经形态视觉传感器:(1)低温度处理(如电子束处理、深紫外光处理和微波处理),(2)可变形材料适应(如低维;材料、有机材料和液态金属)和(3)机械稳健结构架构(例如,纳米结构、刚性岛和Kirigami结构)。
未来,有必要开发一种能够在当前二维平面图像识别的基础上,识别三维图像信息的神经形态视觉传感器。此外,还需要建立基于神经形态视觉传感器的具有主动决策和被动保护功能的智能视觉系统,以加快智能机器人和自动驾驶的发展。
作者简介