研究背景
管道被广泛应用于石油化工、发电、核能和医疗保健等行业,用于输送气体、液体等关键介质。然而随着使用时间增长,管道系统常出现老化、腐蚀、堵塞和损坏等问题,因而需要定期进行内部检查。传统的检查方法往往难以进入这些管道内部,因为许多管道具有复杂弯曲的几何结构和仅毫米级的狭窄空间。这对常规检测技术提出了巨大挑战,也催生了对新型检查手段的迫切需求。
近年来,微型机器人技术作为一种新兴方案,在管道内部检查方面展现出巨大潜力。各种驱动原理的微型机器人相继被开发,包括磁驱动、气动、介电弹性体、电磁、电化学、光驱动以及压电驱动等。然而,驱动机构和结构尺寸等要求进一步限制了微型机器人的应用环境。由气动或电机驱动的机器人通常只能用于较大直径管道。磁驱动机器人不适用于铁磁材质管道,光驱动机器人无法在不透明管道中工作,而且它们的运动速度普遍较慢;介电弹性体驱动的机器人虽然具备一些速度优势,但驱动往往需要数千伏高压。因此,实现一种能够在狭窄密闭管道中高速导航且低电压驱动的微型机器人一直是一个亟待解决的挑战。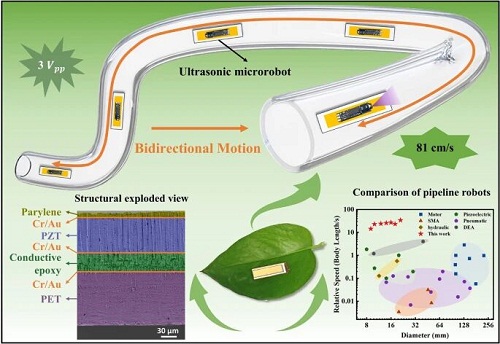
An Ultrasonic Microrobot Enabling Ultrafast Bidirectional Navigation in Confined Tubular Environments
Meng Cui, Liyun Zhen, Xingyu Bai, Lihan Yu, Xuhao Chen, Jingquan Liu, Qingkun Liu, Bin Yang*
Nano-Micro Letters (2026)18: 43
https://doi.org/10.1007/s40820-025-01894-y
本文亮点
1. 高速双向运动:超声微型机器人通过频率调制可在微型管道中实现双向导航运动,最快速度达到81 cm/s。
2. 优异驱动性能:基于MEMS工艺制备的超薄压电复合薄膜作为驱动单元,使机器人可在mm级狭窄管道(4 mm高)内实现快速导航,同时具备高性能的爬坡能力(24.25°)和显著承载能力(超过自身重量的36倍)。
3. 多场景适应性:微型机器人可在弯曲管道、不同材质管道中甚至水面上灵活移动;搭载微型内窥镜相机实现实时成像,展现出在高效管道检测中的巨大应用前景。
内容简介
管道被广泛用于核电站、化学工厂、医疗器械等环境中,用于输送气体和液体。这些管状环境通常具有复杂的几何形状、密闭空间和毫米级的高度限制,对传统的检查方法提出了重大挑战。上海交通大学杨斌等人提出了一种超声驱动微型机器人(重量约80 mg,尺寸24 mm × 7 mm,厚度210 μm),能够在狭窄管道中实现敏捷的双向高速运动。该机器人采用基于MEMS工艺的高性能压电复合薄膜微结构,实现了超薄的主体设计。在超声频率信号驱动下,机器人展现出多种振动模式:其运动速度在约54.8 kHz频率下达到81 cm/s,超越了最快的压电微型机器人;通过调节驱动信号频率可以控制运动方向,实现前进或后退的切换。值得注意的是,机器人启动运动所需的最低驱动电压仅为3 Vpp,显示出优异的低电压驱动性能。此外,该机器人能够轻松攀爬24.25°的斜坡,并承载超过自身重量36倍的负载。实验证明,机器人可以灵活地穿行于弯曲的L形管道、不同材质的管道,甚至可以在水面上行进。此外,通过集成微型内窥镜摄像头,该机器人可以在玻璃管道内部进行实时图像采集,展现了其在密闭管状环境中进行高精度检测的潜力。
图文导读
I 超声微型机器人的设计与制造
该机器人的设计灵感来源于多足蜈蚣的逆行波步态耦合运动:当机器人工作在超声谐振频率时,身体产生沿长度方向传播的弯曲波,形成与蜈蚣类似的逆行波步态运动,从而实现高速前行。结构上,该机器人由三层主要部分组成:柔性PET基底(100 μm)、PZT 薄膜(70 μm)以及Parylene-C 薄膜(10 μm),同时配有上下 Cr/Au 电极(20/200 nm)和导电银环氧树脂粘合层(30 μm)。整体尺寸为24 mm × 7 mm × 210 μm,重量约 80 mg,具备轻薄紧凑的优势。
机器人的制造基于MEMS工艺,主要步骤包括:PZT 基材的减薄与图案化;在 PET 与 PZT 表面溅射电极;使用导电银环氧进行转移键合并固化;在 PZT 顶面继续沉积电极并引出电极线;最后通过化学气相沉积工艺在整体表面覆上 Parylene-C 薄膜进行封装。该多层复合结构兼具机械强度、柔性与电学绝缘性,为高性能运动提供了保障。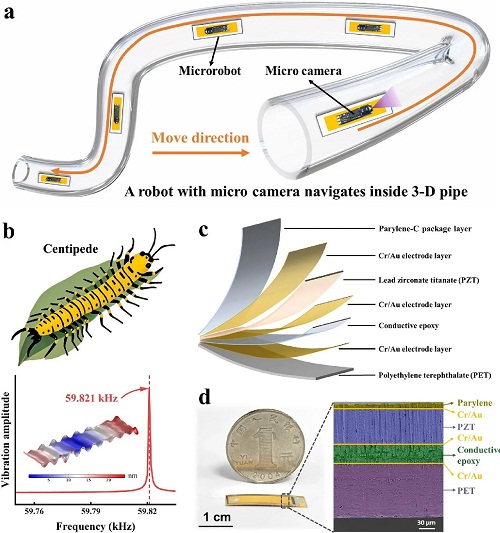
图1. 超声微型机器人的设计。(a) 配备微型内窥镜相机的微型机器人在玻璃管中执行检查任务的概念图。(b) 多足蜈蚣的图片与微型机器人在其共振频率下的模拟工作模式之间的比较,表明机器人表现出与蜈蚣类似的逆行波运动模式。(c)微型机器人结构设计的爆炸示意图。(d) 光学照片显示制造的微型机器人与一枚一元硬币放在一起进行尺寸比较,插图 SEM 图像提供微型机器人的横截面视图,突出显示其多层材料成分。
II 工作机制与性能表征
微型机器人的工作原理基于 PZT 压电薄膜在交变电场下的快速伸缩变形。当施加超声频率范围的正弦信号时,压电薄膜会诱发高阶弯曲模态,使机器人本体产生波浪状运动。这种运动在共振条件下得到显著放大,并结合机器人与管壁之间的摩擦耦合,最终将微观振动有效转化为宏观的高速运动。
实验与仿真结果表明,机器人在接近谐振频率(约 54.8 kHz)时运动性能最佳,速度可达 81 cm/s。同时,通过调节驱动频率可以切换运动方向,实现前进和后退两种模式,这主要与不同模态下机器人与管道内壁接触点产生方向不同的椭圆运动轨迹有关,其中前进时的速度明显快于后退模式。这一结果验证了该机器人依托频率可编程振动模态实现双向高速运动的独特机制。对驱动电压与运动速度的关系进行了实验测试。结果显示,速度随驱动电压增大呈近似线性增长趋势,证明了压电驱动在能量输入与运动性能间的高效转换能力。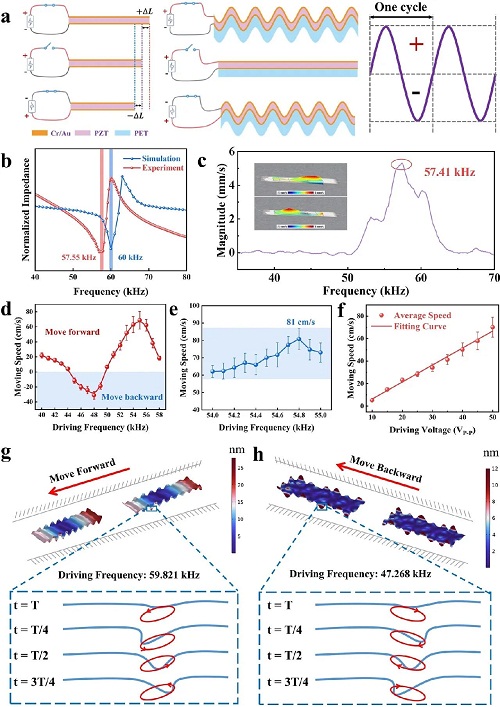
图2. 超声微型机器人的运动机理及性能表征。(a) 左图为PZT薄膜的驱动机理,在正电压作用下薄膜伸长∆L,负电压作用下薄膜收缩∆L。右图为微型机器人在超声频率正弦信号驱动下的相应驱动模态。(b) 微型机器人阻抗特性曲线的模拟值与实验测量值对比。(c) 使用激光多普勒测振仪获得的振动测试结果,显示了振动速度响应谱随频率的变化以及最大振动速度下的振动模式。(d) 微型机器人运动速度与驱动信号频率的关系,阴影部分表示向后运动。(e) 微型机器人最大运动速度随驱动信号频率的微调测试结果。(f) 微型机器人运动速度与驱动信号电压幅值的关系。所有误差线代表三次测量的标准差。(g) 微型机器人向前运动时的机理分析,显示了模拟的向前运动模式和 59.821 kHz 的特征频率。下面的简化图说明了节点与接触面形成逆时针椭圆轨迹。(h) 微型机器人向后运动时的机理分析,显示了模拟的向后运动模式和 47.268 kHz 的特征频率。下面的简化图说明了节点与接触面形成顺时针椭圆轨迹。
III 微型机器人运动测试与分析
对微型机器人在不同管道环境中的运动性能进行了测试和分析。在直径 21 mm 的圆形玻璃管道中,机器人能稳定高速运动,最高速度达 81 cm/s,并通过实时位移和速度曲线得到验证。在更狭窄的方形管道中(内径 9 mm,高度 4 mm),机器人最高速度仍可达 34.3 cm/s,证明其在毫米级高度限制下依然具备良好机动性。通过频率调制,机器人实现了前进与后退的双向运动,其中前进速度明显快于后退速度。这表明该微型机器人不仅适用于常规管径环境,也能在极端受限空间中灵活工作,具备高度的环境适应性。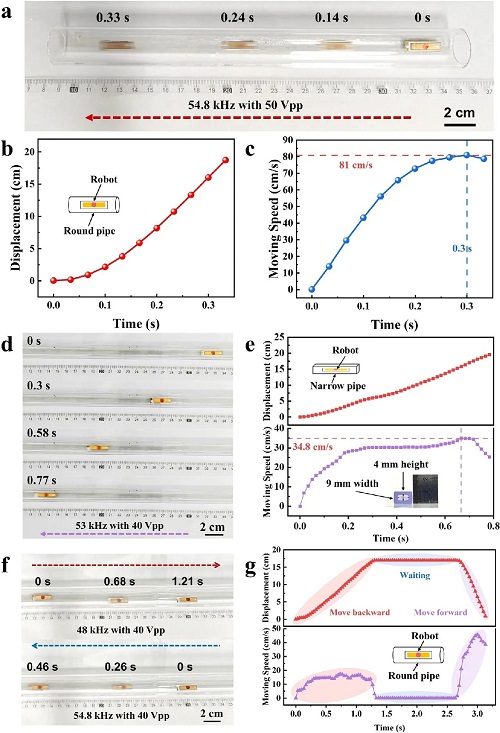
图3. 微型机器人在各种形状管道中的运动演示与分析。(a) 微型机器人在内径 为21 mm 的圆形玻璃管中的运动演示。(b)-(c) 微型机器人在运动过程中的实时位移和速度曲线,显示机器人的最快速度为 81 cm/s。(d) 微型机器人在内径 9 mm、高 4 mm 的狭窄方管中的运动演示。(e) 微型机器人在运动过程中的实时位移和速度曲线,显示机器人的最快速度为 34.3 cm /s。(f) 微型机器人在圆形玻璃管中的双向运动演示。(g) 微型机器人在双向运动过程中的实时位移和速度曲线,表明机器人向前移动时具有更快的移动速度。
IV 驱动性能、爬坡及承载能力演示
对比了微型机器人在不同直径管道内的运动性能。结果显示,在较大内径管道中(如21 mm圆管),机器人能够保持高速运动,而在狭窄管道中(如9 mm管道),速度有所下降,但依然表现出较强的适应能力。进一步的对比表明,该超声微型机器人在相同尺寸管道中的运动速度明显优于其他驱动方式的管道机器人,凸显了其在速度与灵活性方面的优势。值得注意的是,在驱动电压仅为3Vpp时,机器人即可实现初始运动,最小驱动电压比 DEA 要求的驱动电压低两个数量级,同时也远低于多数压电微型机器人所需的最小驱动电压,显示出其高效的驱动性能,在能源效率和操作性能方面具有显著优势。
在爬坡和承载能力测试中,机器人展现出优异性能。当驱动电压为 10 Vpp时,机器人能够顺利攀爬16.12°的斜坡;当电压为30Vpp时,机器人以13.14 cm/s的平均速度快速爬上 24.25° 的斜坡。在负载实验中,机器人在自重仅 80 mg 的情况下,能够承载重达 2.9 g 的螺母,相当于自身重量的 36 倍,同时保持11.5 cm/s的较高速度。进一步测试发现,随着负载增加,机器人的速度逐渐下降,但在适度负载下仍能维持较高的运动性能。这些结果凸显了机器人卓越的稳健性和在承重任务中的出色性能。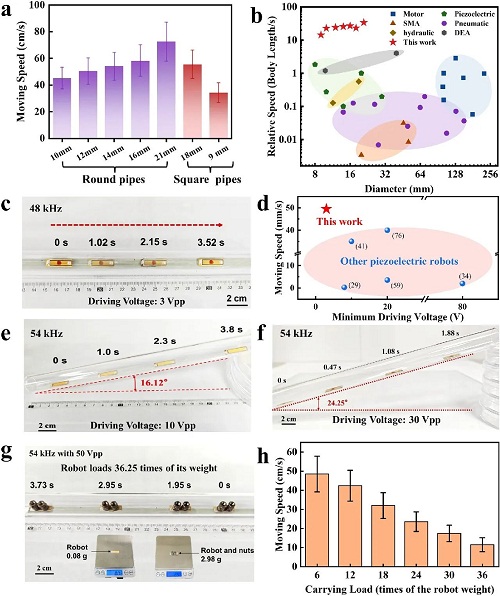
图4. 驱动性能对比及爬坡、承重能力演示。(a) 微型机器人在不同内径管道中的运动速度对比。(b) 不同驱动原理管道机器人的工作管道尺寸与运动速度比较。(c) 驱动电压为3 Vpp时微型机器人的运动演示。(d) 不同压电微型机器人的最小驱动电压及对应运动速度对比。(e) 驱动电压为10 Vpp时,微型机器人攀爬16.12°斜坡的演示。(f) 驱动电压为30 Vpp时微型机器人快速攀爬24.25°斜坡的演示。(g) 微型机器人(自重80 mg,负载2.9 g螺母)承载36倍自身重量的运动演示;(h) 负载不同重量时微型机器人的运动速度对比。误差线表示三次测量结果的标准差。
V 微型机器人在复杂环境下的运动实验
在复杂环境中,机器人展现出极强的适应性。在弯曲半径为39 mm的L形管道中,机器人可以顺利通过弯曲管道。在不同材质的管道中(不锈钢、PVC 等)也能实现双向运动,证明其跨材质兼容性。此外,将驱动频率调整为1 kHz 时,机器人还能突破表面张力在水面上运动。最后,在机器人顶部安装一个微型内窥镜摄像头(约 200 mg),实现了对透明玻璃管道内的实时成像。验证了机器人执行微型管道巡检任务的可行性,为未来在复杂管网和医疗场景中的应用提供了有力支撑。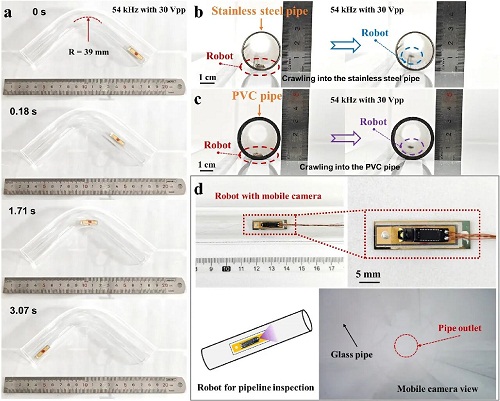
图5. 微型机器人在弯曲管道、不同材质管道中的运动演示,以及其使用安装的微型摄像机执行检查任务的能力。(a) 演示微型机器人在转弯半径为 39 毫米的 L形管道中导航。(b) 微型机器人爬进不锈钢管道。(c) 微型机器人爬进 PVC 管道。(d) 配备微型内窥镜摄像机的机器人在透明玻璃管道内检查环境时捕获的图像。
VI 总结
本文报道了一种基于超薄压电复合结构的超声微型机器人,其核心优势在于低电压驱动(3Vpp)、高速运动(81 cm/s)、双向可编程导航、优异的爬坡与负载能力。机器人能够适应直径为 9–27 mm 的宽范围微型管道,跨越不同材质,并在弯管及水面环境中保持稳定运行。相比其他驱动原理的微型机器人,该设计在速度、能效和环境适应性方面展现出明显优势。研究还通过集成微型内窥镜相机验证了其在管道检测中的应用潜力。未来若进一步实现电源与通信模块的集成,机器人将具备无线自主运行能力,从而在能源、化工、核电以及医疗检测等领域发挥更大作用。
作者简介

关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 上交杨斌等封面文章:可在密闭管状环境中实现超快速双向导航的超声微型机器人
 喜讯 | IF=38.5, Nano-Micro Letters影响因子新突破!
喜讯 | IF=38.5, Nano-Micro Letters影响因子新突破! 哈工大田艳红等:界面工程策略构筑高输出可拉伸湿气发电机
哈工大田艳红等:界面工程策略构筑高输出可拉伸湿气发电机 澳大利亚伍伦贡大学陈俊等前瞻:模块化电催化及其在碳氮循环中的工业化前景
澳大利亚伍伦贡大学陈俊等前瞻:模块化电催化及其在碳氮循环中的工业化前景 沈阳药科大学赵勤富等综述: 聚多巴胺纳米平台抗氧化及氧化应激疾病研究进展
沈阳药科大学赵勤富等综述: 聚多巴胺纳米平台抗氧化及氧化应激疾病研究进展