Microscale Architectures for Intelligent SoftRobotics: From Functional Microneedles to Biointegrated Wearable Systems
Xin Li, Ran Xu, Chenchen Xie, Zhixing Ge *, Bingbing Gao *,Chwee Teck Lim
Nano-Micro Letters (2026)18: 179
https://doi.org/10.1007/s40820-025-02026-2
本文亮点
1. 全链条架构整合与前沿平台赋能: 本文全面系统地阐述了软体机器人系统在材料创新、多尺度结构设计、功能协同及智能控制方面的深度集成 。文章重点剖析了以微针阵列和4D打印水凝胶为代表的前沿架构,充分展示了它们在可编程驱动、多模态传感以及精准药物递送等生物医学和环境交互应用中的巨大潜力。
2. 直击应用瓶颈与下一代智能化演进: 针对当前软体机器人在长期耐久性、电源自主性及多功能协同等实际运行中的关键挑战,本文提出了极具前瞻性的解决路径 。重点强调了推动模块化与标准化建设、开发自修复材料,以及深度融合数据驱动的AI控制策略,从而为打造高适应性、可临床转化的下一代智能软体机器人奠定基础。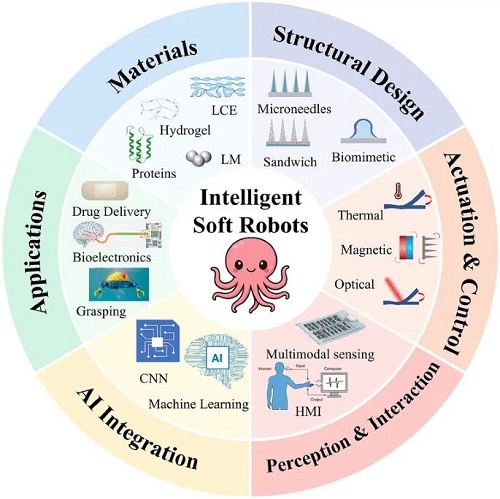
研究背景
软体机器人过去研究主要聚焦于材料层面对生物相容性及变形自愈等功能的驱动设计,如水凝胶、弹性体、液态金属、蛋白质基材料等柔软,安全,可驱动变形的材料。然而仅凭材料性能无法解决精准驱动、主动感知、高效能量管理与稳定闭环控制等瓶颈问题。在材料基础上联合微尺度结构设计成为当下研究热点,涌现出了微针阵列、4D打印水凝胶、液晶弹性体、液态金属网络等微尺度结构单元,不仅能够实现可编程形变、界面穿刺、药物递送、体液采集和信号传输,还能作为软体机器人的“生物界面单元”,承担感知、执行与反馈等多重功能。此外,柔性电子、微能源装置和机器学习算法的融合,推动软体机器人从“材料驱动”迈向“结构 – 功能 – 智能协同”的新阶段。
内容简介
针对软体机器人从传统 “材料驱动” 向 “结构 – 功能 – 智能协同” 演进的前沿趋势,南京工业大学高兵兵团队立足材料 – 结构 – 功能一体化集成视角,聚焦微尺度构型设计这一核心突破策略,重点阐述了微针(MN)平台、4D 打印水凝胶器件及复合异质结构等模块化、可重构架构在攻克软体机器人精密致动、前瞻感知、自适应能效调控与闭环控制等关键瓶颈难题上取得的突出成果。此外,文章还介绍了人工智能赋能下传感以及能源一体化集成在智能软体系统中的最新研究进展。本文系统梳理并展望微尺度精细构型在高性能智能软体机器人中的关键作用与发展方向,对于构筑下一代具备生物兼容、自适应响应与高智能自主特性的先进软体装备,具有重要科学指导价值与工程应用前景。
图文导读
I 软体机器人:从简单驱动到智能应用的跨越
图1展现了软体机器人发展的里程碑历程,从驱动系统产生到结构创新材料进步,从远程电磁控制医疗到AI智能调控,软体机器人经历了从材料驱动到 “材料 – 结构 – 智能系统” 驱动的飞跃。过去十年中,软体机器人以水凝胶,液晶弹性体,金属复合材料及蛋白质基等柔性多功能材料为基础,配合微针,微流体,柔性电极等微尺度架构层级,结合外界光,热,磁,电驱动为动力,加以感知交互器件与人工智能赋能,实现了从简单驱动抓取到智能感知应用的跨越,标志着软体机器人迈向智能化的新阶段。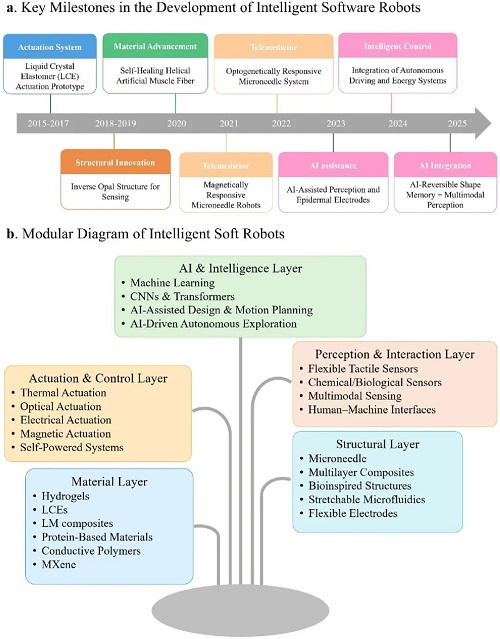
图1. a 2015年至2025年智能软机器人开发关键技术里程碑时间线。b 智能软机器人模块化示意图,展示了五个核心子系统之间的层级架构和功能交互。
II 微尺度几何结构设计与材料融合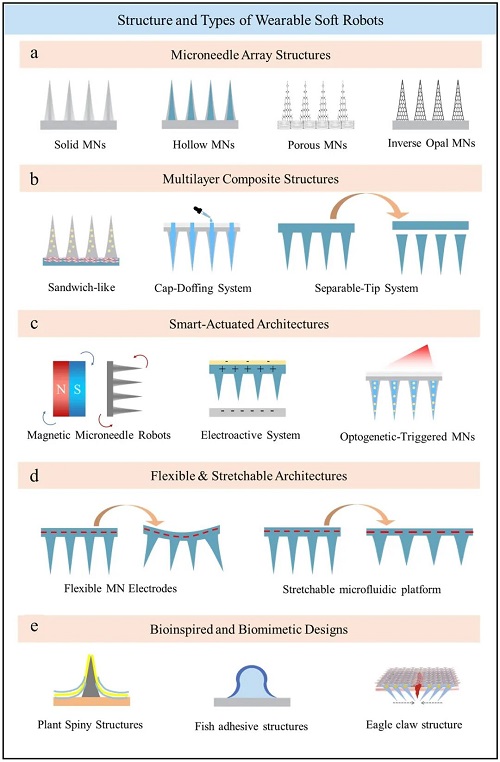
图2. 可穿戴软机器人的结构与类型多样性。
软机器人集成了功能多样的结构形式,如图2所示,展示了微针阵列结构,多层复合结构,智能驱动架构,灵活可拉伸架构以及仿生结构设计五类结构。其中微针阵列结构可通过固体和空心结构实现可调节药物释放;以三明治系统为代表的多层复合结构可通过分层组件设计实现药物递送,电刺激及细胞整合等功能集成;智能驱动架构通过与磁电结合可以实现远程可编程生物集成功能;柔性微流控微针弥合了机械适应性和电气或生化性能之间的差距,在生物体内维持信号传导及流体电气功能;模仿攀岩鱼,鹰爪的仿生微针设计为软体机器人锚定机制及界面适应提供新范例。综上,多样化拓扑构型与仿生微纳设计协同赋能软体微针平台,实现了药物递送、远程驱动、电生理监测与稳健界面锚定等多功能集成,有力推动其在精准医疗与动态生物界面中的智能化应用。
如图3所示,目前软体机器人常用构筑材料涵盖水凝胶、弹性体、液晶弹性体(LCE)、液态金属、蛋白质基材及其多相复合体系,普遍兼具高柔顺、可拉伸与强环境响应特性,能够高效适配复杂自然界面与生物微环境。在结构层面,通过微尺度精细构型调控,如层级排布、各向异性网络、多孔骨架、曲折 / 折纸拓扑以及梯度应力分布等策略,可精准定制材料力学响应与形变路径,进而实现抓取、爬行、收缩、卷曲等多样化可控运动。通过将本征材料属性、微纳结构拓扑与外场能量输入(光、热、磁、电)协同耦合,软体机器人得以从被动柔顺形变升级为主动智能响应,为可穿戴器件、微创诊疗及仿生智能系统的发展提供关键结构基础与性能支撑。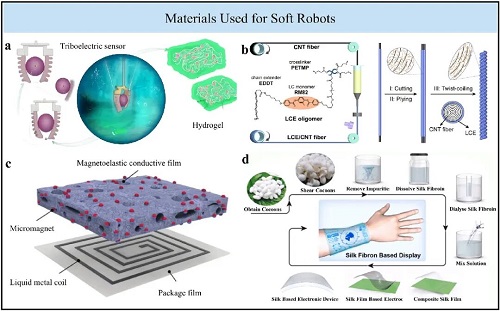
图3. 软机器人中常用的四种材料。
III 智能驱动与能量管理
智能驱动与能量管理是软体机器人实现自主运动与功能化操作的核心模块,其性能优劣直接决定机器人在复杂场景下的作业可靠性与续航能力。当前常用的驱动方式包括光、热、磁、电以及化学刺激等,这些外场激励可与水凝胶、液晶弹性体、液态金属网络等智能材料精准耦合,通过调控材料内部应力分布与分子构象变化,实现可编程形变、定向驱动和多模态响应,满足抓取、爬行、姿态调整等多样化动作需求。同时,为摆脱外部笨重电源的限制,软体机器人领域正逐步引入柔性电池、微型超级电容、摩擦纳发电机(TENG)、生物燃料电池等新型微能源系统,通过优化电极界面电子密度分布、兼顾材料高电导率,实现储能效率与结构稳定性的同步提升,赋予设备自供能与能量回收能力。值得注意的是,多孔网络与三维电极结构的创新应用,进一步拓展了离子扩散通道、缩短了电子传递路径,有效解决了传统柔性能源器件在高频充放电、反复机械弯曲循环下性能衰减的痛点,确保能源模块在动态工况下仍能稳定输出。通过驱动机制与能量模块的一体化设计,将智能材料的响应特性、微纳结构的调控优势与新型能源系统的供能潜力深度融合,软体机器人能够完成连续动作控制、稳定能量输出以及精准闭环响应,为可穿戴设备、微创诊疗和环境监测等对柔性、可靠性要求极高的场景,提供更加可靠、高效和智能的动力支持。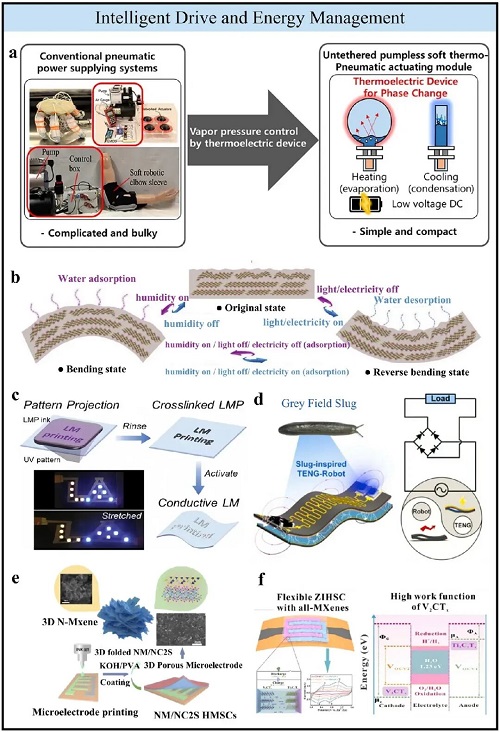
图4. 智能驱动与能量管理。
IV 人工智能赋能软体机器人发展
软机器人与人工智能的深度融合正推动软体系统从被动执行向自主决策进化。借助机器学习、深度学习和数据驱动建模,软机器人能够实现材料性能预测、形变行为模拟、路径规划与自适应控制等能力,大幅提升动作精准度与环境适应性。同时,基于柔性传感器采集的大数据可训练智能算法,使软机器人具备实时辨识外界刺激、预测未来状态并执行闭环反馈的能力。在系统集成层面,AI 还可辅助优化结构设计、能量管理与多模态驱动策略,实现更高效的功能协同。人工智能的加入使软体机器人逐渐具备“感知 – 理解 – 行动”的智能链路,为可穿戴健康监测、微创诊疗、智慧交互及自适应仿生系统带来全新的发展路径。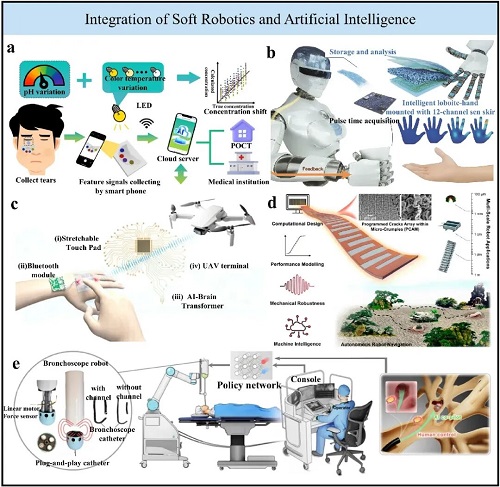
图5. 软机器人与人工智能整合。
V 智能感应与生物交互
智能感应与生物交互是软体机器人实现临床应用与可穿戴功能的关键环节。借助柔性、电化学、光学以及多模态传感器,软机器人能够实时监测压力、温度、应变、化学分子及生理信号,实现对人体或环境状态的连续感知。通过与皮肤、组织或体液等生物界面的高度匹配,软体机器人可在低刺激和高舒适度的条件下执行黏附、穿刺、采样与局部反馈等任务。微针、液态金属网络和仿生水凝胶等材料进一步提升了界面稳定性与信号质量,使设备在汗液、间质液(ISF)或创面环境中保持可靠工作。智能感应模块的加入,使软体机器人不仅能“感知”生物信息,还能与机体产生动态交互,为健康监测、伤口管理、精准治疗和人机融合系统提供重要支撑。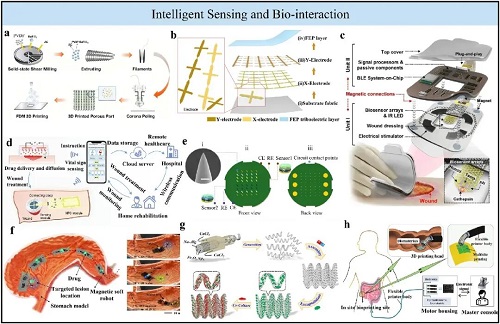
图6. 智能感应与生物交互。
VI 总结
本文系统综述了微尺度精细构型在高性能智能软体机器人中的关键作用与发展方向,从材料创新、结构可编程性、功能协同、智能响应等方面综述了软机器人的最新进展。
在材料创新方面,软体机器人以四种常用材料为依托,配合微尺度精细材料构型调控,完成了软体机器人从被动感知到主动响应的跨越。
结构作为软体机器人设计的另一核心模块,配合多层结构,柔性电极,微流控器件,逐渐实现结构可编程软体机器人,为多功能机器人设计提供基础。
软体机器人通过与传感器,人机界面结合,促使传感,交互功能协同增强,并在此基础上联合摩擦纳米发电机实现自供能传感,为一体化智能系统提供能源支撑。
人工智能的出现开辟了软体机器人自感知处理的新纪元,使其逐渐具备“感知 – 理解 – 行动”的智能链路,搭建了软体机器人从实验测试到临床应用的桥梁。
软机器人在长期耐久性、力输出与控制精度以及能源自主性方面仍存在瓶颈,未来需从高韧性与生物稳定性材料、软硬混合可编程结构、高效驱动机制以及嵌入式智能算法等方向协同发力,构建兼具自感知、自适应与自主决策能力的软机器人体系,最终实现其在真实复杂场景中的长期稳定运行与广泛临床/工程应用。
作者简介



关于我们
Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 新加坡国立大学C.T. Lim院士等综述:面向智能软机器人的微尺度结构设计-从微针到集成可穿戴系统
 新加坡国立陈伟&哈工大付传凯/马玉林&浙大王利光等:超亲钠离子-电子混合导体界面相助力长寿命准固态钠金属电池
新加坡国立陈伟&哈工大付传凯/马玉林&浙大王利光等:超亲钠离子-电子混合导体界面相助力长寿命准固态钠金属电池 西南交通大学孟凡彬团队:局域场增强与场耗协同解锁低频超薄可级联超材料
西南交通大学孟凡彬团队:局域场增强与场耗协同解锁低频超薄可级联超材料 南工大宗鹏安等:金字塔界面Bi₂Se₃/碳薄膜实现水下双模温度-压力传感
南工大宗鹏安等:金字塔界面Bi₂Se₃/碳薄膜实现水下双模温度-压力传感 国防科技大学孙巍巍、郑春满团队:双壳层硫宿主调控动态电解液微环境,助力实用化锂硫电池
国防科技大学孙巍巍、郑春满团队:双壳层硫宿主调控动态电解液微环境,助力实用化锂硫电池