研究背景
基于金属纳米结构/弹性体的复合材料被广泛用于构建柔性电极,但其难以与粗糙的皮肤表面形成共形接触。基于纳米复合导体和水凝胶的混合电极是更理想的选择,但水凝胶与聚合物的结合通常依赖化学修饰,导致其物理特性的改变。本研究提出了基于机械互锁的纳米复合导体/水凝胶混合电极的设计与制造方法。将柔软的微孔泡沫与银纳米线电极物理键合,利用其多孔结构与水凝胶形成互穿网络,将界面韧性提高了28倍,实现了复合导体与水凝胶的牢固结合。采用生物粘附水凝胶的混合电极能与皮肤贴合并获得低接触阻抗,可采集高质量生物电信号,也能集成到人机交互系统中。这些混合电极融合了纳米复合材料与水凝胶的性能优势,在贴肤可穿戴器件系统中有广阔的应用前景。
A Generic Strategy to Create Mechanically Interlocked Nanocomposite/Hydrogel Hybrid Electrodes for Epidermal Electronics
Qian Wang, Yanyan Li, Yong Lin, Yuping Sun, Chong Bai, Haorun Guo, Ting Fang, Gaohua Hu, Yanqing Lu*, and Desheng Kong*
Nano-Micro Letters (2024)16: 87
https://doi.org/10.1007/s40820-023-01314-z
本文亮点
1. 纳米复合导体/水凝胶混合电极通过引入聚合物微泡沫作为机械互锁层,有效地提升了界面韧性。
2. 混合电极中的银纳米线和水凝胶通过多孔微泡沫相互导通,使得电极具有高导电性和低皮肤接触阻抗,可实现高质量的生物电位检测。
3. 基于微泡沫的界面结合策略具有较强的通用性,适用于多种聚合物与水凝胶构建混合电极。
内容简介
纳米复合导体和水凝胶混合电极的是一种有吸引力的表皮电子材料,但将水凝胶与聚合物直接进行界面结合通常具有挑战性。南京大学陆延青教授和孔德圣教授课题组报道了构建机械互锁纳米复合导体/水凝胶混合电极的通用策略。首先,将银纳米线(Ag NW)喷涂在苯乙烯基嵌段共聚物(SEBS)衬底上,然后将SEBS微泡沫贴合到Ag NW纳米复合导体上,利用其多孔结构与水凝胶进行机械互锁,响应电极表现出158.2 J m⁻2的高界面韧性,相较于直接堆叠的方式提高了28倍。在SEBS基底外,该微泡沫可以通过增粘树脂改性并与多种高分子基底结合,包括乙烯-醋酸乙烯酯共聚物(EVA)弹性体、聚(甲基丙烯酸甲酯)-聚(n-丙烯酸丁酯)(PMMA-PnBA)弹性体和聚对苯二甲酸乙烯酯(PET)塑料等,从而制备牢固的水凝胶/聚合物混合叠层材料。纳米复合导体在贴合微泡沫后,仍然能够通过多孔微结构与水凝胶实现相互导通。选取聚多巴胺-聚丙烯酰胺(PDA-PAM)水凝胶,所制备的混合电极表现出对皮肤的强粘附性和共形接触,其皮肤接触阻抗比商用Ag/AgCl凝胶电极更低,无需额外的粘合剂即可有效采集高质量的心电图(ECG)和肌电图(EMG)信号。此外,本研究基于机械互锁混合电极与银纳米线复合导体构建了一个集成化贴肤传感系统,通过记录上臂肌肉的电信号来区分不同的手势,形成了体感人机界面。基于机械互锁原理的混合电极与现有的贴肤电子器件的设计与制造相兼容,能够结合纳米复合导体与水凝胶的性能优势,在可穿戴电子器件与系统中具有广泛的应用潜力。
图文导读
I 机械互锁电极的设计和制造
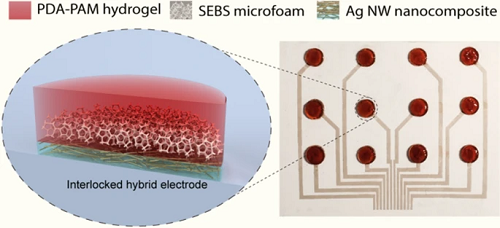
图1a展示了一个由机械互锁电极与Ag NW复合导体线路所构成的贴肤电子器件。具有高电导率的Ag NW纳米复合材料构成与外部设备连接的线路,而具有生物粘附性的水凝胶用于与皮肤建立稳定共形的界面。图1b揭示了制备聚合物/水凝胶叠层混合材料的关键步骤。
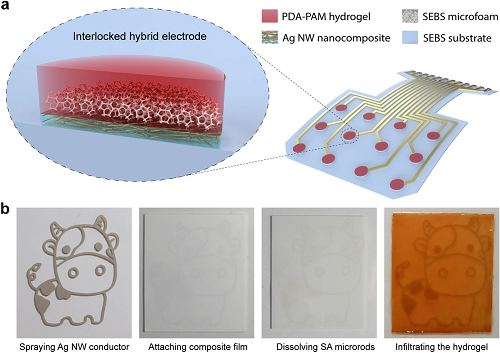
图1. 基于机械互锁的纳米复合导体/水凝胶混合电极的设计和制造。(a)贴肤电子传感器件的结构示意图。(b) 制备工艺流程中关键步骤的光学照片,包括喷雾沉积Ag NW纳米导体,热压贴合水杨酸微棒/弹性体复合薄膜,溶解内嵌水杨酸微棒造孔剂形成多孔泡沫,灌注水凝胶前驱体并进行自由基聚合。
II 互锁结合机制的表征
如图2a所示,基于水杨酸微棒与SEBS弹性体的复合薄膜具有较高的模量,能够机械自持而易于操作。相比之下,SEBS微泡沫柔软且容易变形,不利于后续操纵和加工。图2b 的SEM图像揭示了SEBS微泡沫的微观结构,其具有数十微米相互连接的孔隙。图2c中的横截面光学图像揭示了弹性体-水凝胶杂交的三层结构,其中相互渗透的水凝胶和SEBS弹性体作为中间键合层。这种互锁混合结构能够在大拉力变形下保持结构稳定性,如图2d所示,混合叠层材料在300%的应变下其中的水凝胶也没有从SEBS基底上剥离。图2e是评估水凝胶-弹性体的鲁棒性的180°剥离测试。与直接堆叠的方式相比,机械互锁的设计使得剥离力明显增大,其界面韧性提高了约28倍,响应数据汇总在图2f。
进一步研究了微泡沫对机械互锁效应的影响。根据图2g和S8,微泡沫的孔隙度通过提升SA微棒的负载量而增加,微泡沫的柔软度随着孔隙度的提高而改善,这反映在模量降低和断裂应变增加上。随着孔隙率的提高略有增加,水凝胶与聚合物的界面韧性先是略有增高然后显著下降。此外,界面韧性也取决于微孔厚度,如图2i所示,140μm左右的微泡沫厚度能够实现最大的界面韧性。
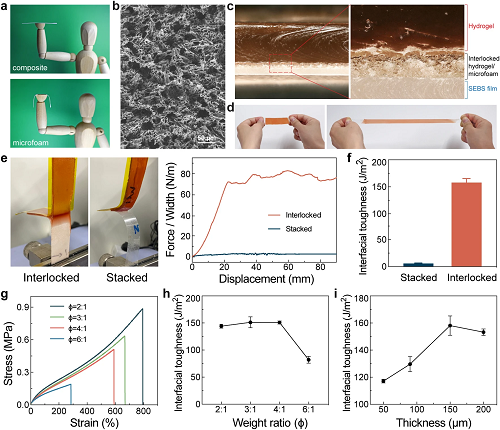
图2. 对互锁机制的表征。(a)光学图像显示自支撑的水杨酸微棒/聚合物复合材料(顶部)和柔软的SEBS微泡沫(底部)。(b)具有互连微孔的微泡沫的SEM图像。(c)互锁水凝胶-弹性体混合体的横截面光学图像。(d)在单轴拉伸变形下互锁水凝胶-弹性体混合体的图像。(e)180°剥离测试的光学图像(左)和力与位移曲线(右),机械互锁和直接堆叠的混合体进行比较。(f)相应的界面韧性。(g)具有不同孔隙度的SEBS微泡沫的单轴应力-应变曲线,其中孔隙度由水杨酸微棒和SEBS弹性体之间的重量比(φ)调节。(h)界面韧性与微泡沫孔隙率的依赖性,微孔厚度~150 μm。(i)界面韧性与微孔厚度的依赖性(φ = 4:1)。
III 在其他聚合物上的通用性
经过增粘树脂改性的微泡沫可以通过热压键合与多种基底稳固结合上,实验中测试了EVA、PMMA-PnBA弹性体和PET塑料基底。如图3a所示,这些微泡沫可以方便地制备互锁的水凝胶/聚合物混合叠层材料,其中水凝胶牢固地粘附在这些聚合物上。图3b显示了PET/水凝胶混合体的180°剥离测试。在图3c中,三种互锁混合体的界面韧性均比直接堆叠的方式有了显著的改进,表明了该方法的通用性。

图3. 不同基底上的互锁混合体。(a)光学图像显示EVA(左)、PMMA-PnBA(中)和PET(右)基板上的互锁混合体和相应的手动剥离过程。(b)水凝胶-PET薄膜180°剥离测试中测量的力与位移。(c)水凝胶与三种不同基底混合体的界面韧性。
IV 互锁混合电极的电气性能和皮肤顺应性
在图4a的插图中,SEM图像揭示了SEBS弹性体矩阵中随机定向的Ag NW。通过测量它们在单轴拉伸变形下的电性能来评估Ag NW纳米复合材料的可拉伸性,如图4a所示。归一化的阻力分别为20%应变为4.74,50%应变为13.53,100%应变为54.08。在图4b中,Ag NW纳米复合材料在50%应变的1000个拉伸松弛周期中表现出有限的阻力变化,在可穿戴应用中表现出优异的耐用性。与连续金属薄膜不同,纳米复合材料依靠裸露的Ag NW进行外部接触,如图4c所示。为了估计实际表面积,用循环伏安法测量淹没在PBS电解质中的纳米复合电极的双层电容(图4d)。原始Ag NW纳米复合材料的电容确定为0.22 mF cm⁻2(图4e)。微泡沫附着后,电容显示一定下降到0.16 mF cm⁻2,表明表面积略微缩小了27.3%。在混合电极中,Ag NW纳米复合材料和水凝胶通过多孔泡沫互锁层实现电学连接。图4f显示出互锁的电极能够牢固地附着在皮肤上。图4g显示了皮肤-电极接触阻抗的频率依赖性。,其中,混合电极的接触阻抗比商用Ag/AgCl凝胶电极更低。需要施加4千帕的压力才能将Ag NW纳米复合电极压缩到有纹理的皮肤表面,其皮肤接触阻抗仍然明显高于混合电极。因此,互锁的纳米复合导体/水凝胶混合电极是可作为贴肤电子器件中理想的机械与电学接口。

图4. 互锁混合电极的电特性。(a)拉力应变下Ag NW纳米复合材料的归一化电阻。插图:SEM图像显示嵌入SEBS弹性体中的随机定向Ag NW。比例尺:2 μm。(b)在1000个拉伸-放松周期内,Ag NW纳米复合材料的电阻变化为50%应变。(c) 裸露(上)和微泡沫附着(下)的Ag NW纳米复合材料示意图。(d)裸露和微泡沫附着纳米复合材料的循环伏安法曲线,扫描速率为0.9 V s⁻1。(e)相应的双层电容值。(f)混合电极牢固地附着在皮肤上。(g)皮肤-电极接触阻抗作为表皮电极频率的函数。
V 表皮生物电位检测
图5a,b显示了用互锁混合电极构建的表皮电子贴片,用于生物电位记录。在图5c中,EMG信号揭示了与开放和关闭手部运动相对应的肌肉纤维的收缩。互锁电极的信噪比(SNR)为29.0分贝,商业凝胶电极为26.2分贝。此外,心电图波形揭示了对心血管疾病诊断至关重要的明确P、Q、R、S和T特征,如图5d所示,互锁电极的信噪比也高于商业凝胶电极。
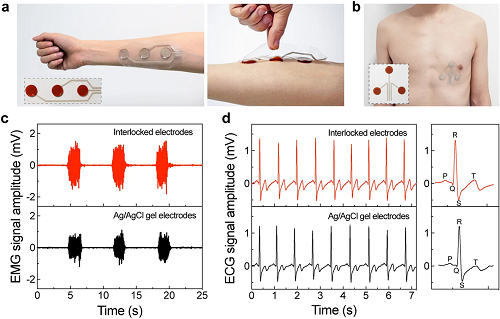
图5. 用于生物电位记录的互锁混合电极。(a)固定在前臂上的表皮传感贴片的图像,以记录EMG信号。(b)光学图像显示安装在左胸部的表皮贴片,用于记录心电图信号。(c)互锁混合电极(顶部)和商业Ag/AgCl凝胶电极(底部)对应几个肌肉收缩-放松周期的EMG波形。(d)心电图信号(左)表现出特征P、Q、R、S和T特征(右)。
VI 集成表皮传感系统的制造和应用
图6a显示了由十二个传感电极组成的软臂带式集成传感系统,其中每组三个电极构成一个独立的EMG通道,旨在监测单个肌肉的活动。传感电极和导电线路在空间上相分离,能够减弱通道之间的相互串扰。在实际应用中,每个传感通道与前臂的主要肌肉相贴合,包括臂颧骨、颧骨屈肌、颧骨屈肌和指伸肌,对不同手势条件下相应肌肉的EMG波形进行记录。各种手势与EMG信号的电压幅值相对应,这反映了相应肌肉的收缩水平,如图6b所示。整个器件系统能够将手势破译为四个模拟信号通道,这本质上代表一个贴肤可穿戴人机交互界面,在机器人控制、智能假肢和虚拟现实等领域具有广泛的应用潜力。
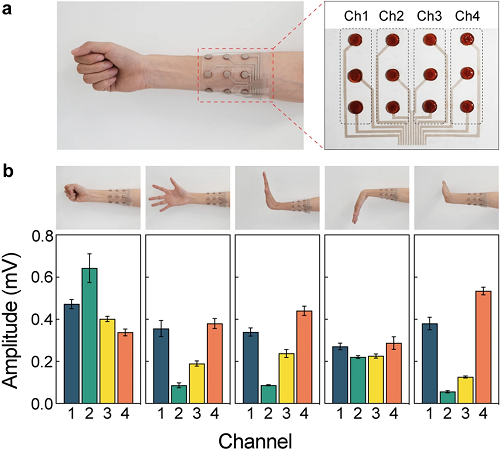
图6. 集成的表皮电子系统作为人机界面。(a) 由十二个传感电极组成的软臂带式集成传感系统。(b)不同的手势(上)对应的每个传感通道的电压振幅(下)。
作者简介

本文通讯作者
(1)微纳光学;(2)光纤光学;(3)液晶光学。

本文通讯作者
(1)复合电子功能材料;(2)柔性可拉伸集成器件;(3)柔性电子制造技术。
关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2022JCR影响因子为 26.6,学科排名Q1区前5%,中科院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 南京大学陆延青与孔德圣等:构建机械互锁纳米复合导体/水凝胶混合电极的通用策略
 山东大学李阳团队:成功模拟生物联想学习行为(如手写体识别)的光电子突触器件,助力神经形态计算
山东大学李阳团队:成功模拟生物联想学习行为(如手写体识别)的光电子突触器件,助力神经形态计算 华科赵龙教授等:环境耐受性双网络离子导电复合水凝胶材料用于高性能柔性电子器件
华科赵龙教授等:环境耐受性双网络离子导电复合水凝胶材料用于高性能柔性电子器件