研究背景
随着柔性电子技术的飞速发展,柔性纤维传感器作为连接人体与外部环境的关键桥梁,在生物医学、智能机器人、环境监测和健康管理等领域展现出巨大潜力。传统的纤维制备方法成本高、难以规模化,限制了应用。不同于这些方法,热拉伸纤维能够定制复杂结构,可以在跨越纳米到千米的长度尺度上提供复杂功能,是最具工业化潜力的新型纤维制备技术。随着热拉伸纤维传感器的飞速发展,亟需对其原理,材料和应用进行系统性梳理,分析未来发展趋势,为该领域的研究人员提供一定参考。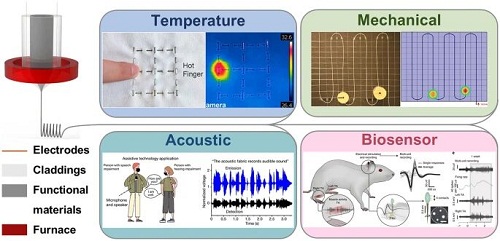
Thermally Drawn Flexible Fiber Sensors: Principles, Materials, Structures and Applications
ZhaoLun Zhang, Yuchang Xue, Pengyu Zhang, Xiao Yang, Xishun Wang*, Chunyang Wang, Haisheng Chen*, Xinghua Zheng*, Xin Yin*, Ting Zhang*
Nano-Micro Letters (2026)18: 4
https://doi.org/10.1007/s40820-025-01840-y
本文亮点
1. 回顾热拉伸工艺:不同于传统的纤维制备技术,热拉伸工艺可以实现复杂结构纤维的稳定大规模制备,综述首先对其制备原理,选材标准及发展历程进行了全面介绍。
2. 多种类型传感器的全面总结:根据不同的外界刺激,综述全面总结了近年来热拉伸温度、声学、机械、化学、生物、光电及多功能传感器的最新进展。
3. 探讨未来发展趋势:综述从材料、结构、制造、功能和稳定性等方面,探讨了热拉伸纤维传感器的未来发展趋势,为从事该领域工作的研究人员提供了一定的思路。
内容简介
柔性纤维传感器具有优异的可穿戴性和生物兼容性,是柔性电子产品的重要组成部分。但是,传统方法都很难实现纤维传感器的低成本大规模制备。近年来,热拉伸多功能纤维发展迅速,已经成为了柔性纤维传感器的一种新的思路。通过预制棒到纤维的热拉伸工艺,可以在短时间内自动化制备在跨越纳米到千米的长度尺度上提供复杂功能的多种纤维传感器。其应用领域广泛,包括温度,声学,机械,化学、生物、光电子学和多功能传感器等;传感原理多样,包含电阻,电容,压电效应,摩擦电效应,光电效应和热电效应。在此背景下,中国科学院工程热物理所张挺研究员团队对热拉伸纤维传感器进行了全面综述。文章首先概述了热拉伸工艺的制备原理,选材标准及发展历程。此外,根据不同的传感类型,本文详细介绍了多种热拉伸纤维传感器的最新进展。最后,文章还从材料,结构,制备,功能,稳定性的角度讨论了热拉伸纤维传感器未来的发展方向。
图文导读
I 热拉伸工艺
热拉伸工艺是一种新兴的纤维制备方法,最初用于制造光纤。由于其具有控制纤维结构和特征尺寸的能力,而受到了材料科学和纺织学领域的关注。与传统纤维制备工艺相比,热拉伸工艺可以在短时间内大规模自动化制备包含高密度器件和多种功能的多材料纤维。此技术很好的匹配了纺织制造工艺的需求,为规模化制造智能织物提供了一个通用的平台。热拉伸工艺的基本原理是将纤维的成型过程与功能化耦合到一个连续的拉伸操作中。在此过程中,所有的组成部分(包层、电极、功能材料等)在粘性熔融状态下共拉伸。图1展示了从预制棒到纤维的制备过程,纤维具有与预制棒相同的成分和结构,但其直径缩小至亚毫米级,并且集成了多材料和多功能。目前热拉伸纤维传感器已经集成了六种传感原理,应用在超过8个领域。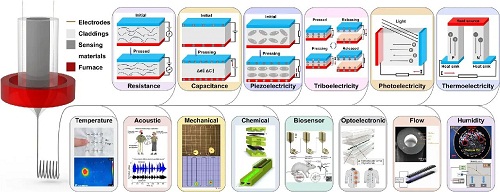
图1. 热拉伸纤维传感器的传感原理及应用。传感原理:电阻,电容,压电,摩擦电,光电和热电;应用:温度,声学,机械,化学,光电子学,流量和湿度。
II 热拉伸柔性纤维传感器的应用
2.1 热拉伸温度传感器
温度传感器在军事、医学、生物等领域应用广泛,其原理主要包括热敏电阻、热电效应及电容器。2006年,Mehmet等人以硫系半导体Ge17As23Se14Te46(GAST)为热敏电阻,首次通过热拉伸方法制备了可以量化温度的温度传感器(图2a)。进一步构建8×8纤维阵列,还可实现空间温度的测量(图2b-d)。石墨烯具有优异的电性能和温度响应特性,已被广泛应用于柔性温度传感器中。Ryu等人制备了一种以rGO和PLA为热敏电阻的TDFS。外层依次为线性低密度聚乙烯(LLDPE)和牺牲聚苯乙烯(PS)(图2e,f)。编制在手套时,能够检测触摸温度(图2g,h)。不同于传统的热敏电阻传感器,Loke等人将数百个分散的热敏电阻和存储元件集合到热拉伸纤维内部(图2i,j),单根纤维就同时实现了温度监测和存储的功能。将纤维编制到衬衫中(图2k),能够连续多天监测并存储温度数据。
基于热电效应,Zhang等人以非晶态半导体玻璃((Te85Se15)45As30Cu25)为功能材料,制备了图2l所示的温度传感器。纤维能够在150℃的宽温度范围内工作,并且温度分辨率高达0.05℃,也可以在固定温度下毫米级定位热源。进一步,构建了一个3×3二维纤维阵列(图2m),同时实现了温度的监测和定位。
此外,将电容器与电频域反射法结合,也可用于分布式温度传感。Yu等人选用热膨胀系数高的低密度聚乙烯(LDPE)为传感材料,制备了图2n所示的纤维。温度变化时LDPE的厚度和介电常数改变,线路阻抗增加,反射信号随之变化,从而实现温度传感(图2p,q)。这种方法在低成本、分布式温度传感方面具有很大的应用潜力。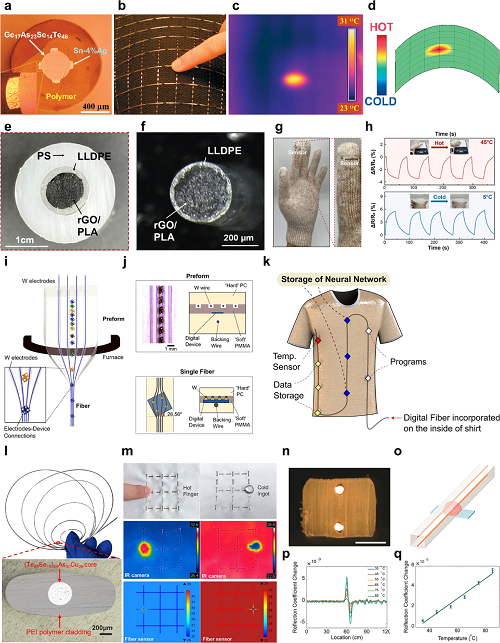
图2. 用于温度传感的热拉伸纤维。a 基于热敏电阻的纤维传感器的横截面照片。b 用于空间温度传感的纤维阵列。c, d 纤维阵列的红外辐射图像及热分布图。e, f 带有rGO/PLA 热敏电阻芯的预制棒与纤维结构。g, h 将TDFS缝制在手套顶部的照片及多点触摸温度测。i, j 集成多个微电子元件的TDFS。k 嵌入温度传感纤维的衬衫。l 以热电材料为芯的传感纤维结构。m 基于3×3 TE纤维阵列的温度传感网络,用于同时检测和定位热源。n 基于FDR的TDFS纤维结构。o 纤维在单点受热的模拟图。p, q 纤维的温度响应及反射系数变化。
2.2 热拉伸声传感器
声传感器可以实现声音定位,声学通信等功能,在自然灾害预测、人体组织超声成像等领域十分重要。大部分声学传感器的原理都是压电效应,压电聚合物是柔性声传感器中应用最广泛的材料,但是其压电常数d₃₃低。为了获得灵敏度更高的声传感器,研究人员从提高有源面积和改善选材两个方面做了很多尝试。
2010年,Egusa等人首次通过热拉伸制备声学传感纤维,包括矩形和同轴结构两种(图3a,b)。纤维均以铁电聚合物P(VDF-TrFE)为压电层,可在千赫兹至兆赫兹频率范围内表现出压电响应和声学转换,兼具传感器与致动器功能,且压电响应符合换能器固有频率特性(图3c)。Wang等人在矩形结构基础上开发声电纤维(图3d),可有效探测2-8MHz水声源,通过构建二维纤维阵列(图3e)也可实现厘米级水声源定位。为了提高声学传感纤维的有源面积,Chocat等人不改变选材,设计了一种图3f所示的折叠状结构,大的接触面积有效提高了纤维压电性能,为实现大规模声学传感提供了可能。为进一步提高有源面积,Lu等人创新的制备了一种具有“瑞士卷”结构的纤维,以碳浸渍低密度聚乙烯(C-LDPE)作为电极层,压电层和电极层交替组成多层包层(图3g)。这种结构进一步提高了压电材料的有源面积,简化了纤维的连接。
热拉伸声学纤维从未编织成织物,而传统织物阻尼声音且纤维空气中灵敏度低。Yan等人受人体鼓膜启发,通过热拉伸制备单根压电纤维(图3h,i),其压电层由BaTiO₃与P(VDF-TrFE)复合材料组成,CPE和四根铜丝为电极,不对称封装于SEBS包层中。通过阶梯极化,纤维压电常数d₃₁提升至46pC/N。通过传统织布机就可将压电纤维编成织物(图3j),织物在可听频率范围内表现出优异的电信号,且性能与商业麦克风相当。该声学织物可应用于声学通信和心音听诊等方面(图3k,l),有望推动人机交互、生理检测等领域的发展。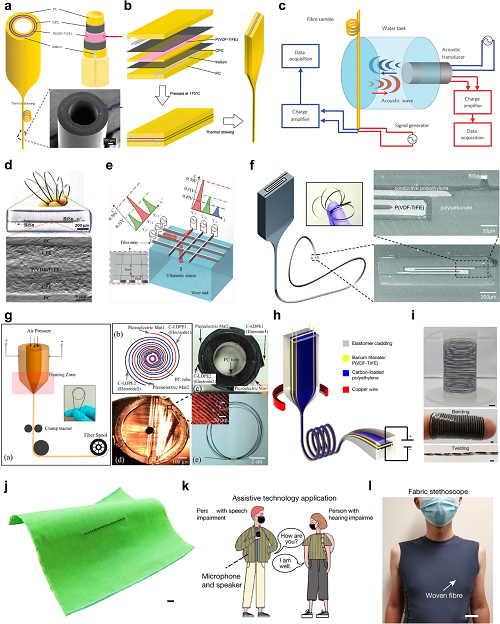
图3. 用于声学传感的热拉伸纤维。a, b 圆柱形与矩形声学纤维的制备,二者采用完全相同材料。c表征声学性能的实验装置。d, e 可定位水声源的压电纤维的结构及其声学传感性能。f 具有折叠结构的声学纤维制备。g 具有“瑞士卷”结构的声学纤维制备。h, i 以BTO/PVDF-TrFE复合材料为压电层的声学纤维。j 内含单根压电纤维的声学织物。k, l 织物在在通信与心率检测中的应用。
2.3 热拉伸机械传感器
机械传感主要包括对压力、应变和弯曲三种变形的测量。机械TDFS在摩斯电码编译、慢性疾病检测等多个领域潜力无限。
用于压力传感的TDFS的原理主要为电阻和电容。Gorgutsa等人首次基于电容器结构制备出压力传感纤维,实现了滑动传感,但仅能检测最靠近外部电极的单点触摸。为解决定位限制,Nguyen-Dang等人借鉴微机电系统(MEMS)设计,开发出具有悬臂梁结构的纤维传感器(图4a),实现了亚毫米级分辨率的压力位置线性响应,并可同时检测两个压力点(图4b)。
微机电纤维的PSU包层是刚性的,人们更倾向于选用弹性体材料来拓展其在可穿戴领域的应用。Qu等人通过流变学分析与微观结构研究,提出热拉伸流变准则,证明Geniomer和SEBS等热塑性弹性体(TPE)适合作为包层材料。以SEBS纤维为例,通过平行排布两个液态金属电极(图4c),首次实现基于电阻和电容原理的压力量化检测,灵敏度高达0.01N。
研究人员在TPE材料的基础上进行了大量研究。例如,Leber等人构造图4d所示的非对称结构,实现了压力的同步定位与量化。将单次拉伸得到的纤维分8根集成到体操垫上(图4e-g),可准确捕捉人体的位置、姿势和动作。该纤维首次实现了大面积传感,但是压力分辨率差。Yu等人结合FDR,初步实现了分布式压力传感。可通过反射信号定位多个压力点,空间分辨率达2.2 cm,压力分辨率为4 kPa。(图4i-k)。Leber等人进一步改进该技术,结合TDR制备了一种液态金属电极同轴排列的压力传感纤维(图4l)。将纤维编入织物进行测试(图4o),实现了<1 cm的精确定位与多压力点量化。
最近,Zhang等人制备出双螺旋液态金属电极的SEBS纤维(图4p-r所示)。特殊的结构赋予了其超1000%的应变和优越的电导率,对微小压力和动态压力都能敏锐响应。而且,其电阻响应在不同压力方向上表现一致,拓展了在复杂环境下的应用潜力。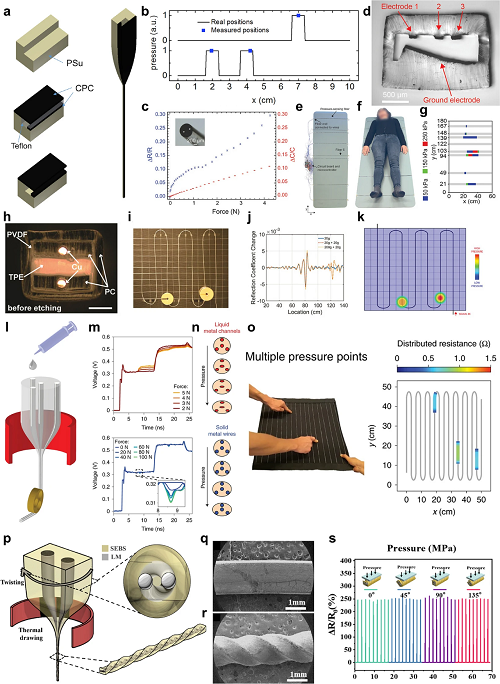
图4. 用于压力传感的热拉伸纤维。a MEMF的制备。b 双点压力测试。c 可用于量化压力的TDFS。d 能够同时量化和定位压力的纤维。e–g 将8根压力传感纤维集成在体操垫上,用于身体姿态与动作监测。h 基于FDR的纤维传感器横截面光学显微图。i–k 多点压力测试的实物照片、反射系数变化及压力分布模拟结果。l 基于TDR的纤维制备。m, n液态金属和固态金属电极在压力下的信号变化及变形机制。o 三点压力测试。p–r HTLSF的制备及形貌。s HTLSF在相同压力、不同方向作用下的相对电阻变化。
用于应变传感的TDFS的原理主要为电容和光电。在SEBS中加入两个平行液态金属电极,基于电阻和电容原理都可实现应变传感(图5a),这也是首个热拉伸应变传感器。电容式应变传感器线性度好,但是变化量小。Leber等人以碳纳米复合材料作为电极,制备了类轴向铅电容器结构的纤维(图5b),电容比平行板结构提高了13倍。图5c为50%至100%伸长率范围内纤维的电流变化,展示了较好的应变传感性能。
光学原理也应用于应变传感器中。利用两种SEBS折射率的差异,测量不同变形下的光损耗,可以测量应变变化。Qi等人基于自愈合聚氨酯(STPU),制备了一种应变纤维传感器。将STPU纤维与亚甲基蓝掺杂的STPU纤维拼接在一起。随应变增加,亚甲基蓝掺杂的纤维光损耗变化比STPU纤维更显著(图5e,f)。纤维在100%的应变范围内近乎线性响应,可用于分布式应变传感。
在基于TDR的压力传感纤维中,信号传输时间随伸长率增加而延长,因此也可用于应变传感,其应变分辨率为0.25%(图5i)。此外,对反射信号解耦,可以同步实现多点压力和应变测量(图5j)。这是机械传感领域开创性的突破,为柔性机器人及可穿戴设备提供了新方案。
用于弯曲传感的TDFS的原理主要为电阻和TENG。Dong等人利用Geniomer的负摩擦极性制备微纹理TENG纤维(图5k),其电输出随弯曲改变(图5l)。但这只是粗略的给出了纤维电输出随弯曲角度变化的规律,并没有进行量化。Leber等人基于碳纳米复合材料电极,制备了TDFS(图5m)。纤维弯曲时,上下电极分别被拉伸和压缩,电阻改变,从而实现弯曲角度的量化(图5n)。如图5o,纤维能够检测出小至5°的弯曲变化。总的来看,弯曲传感器的发展还在起步阶段。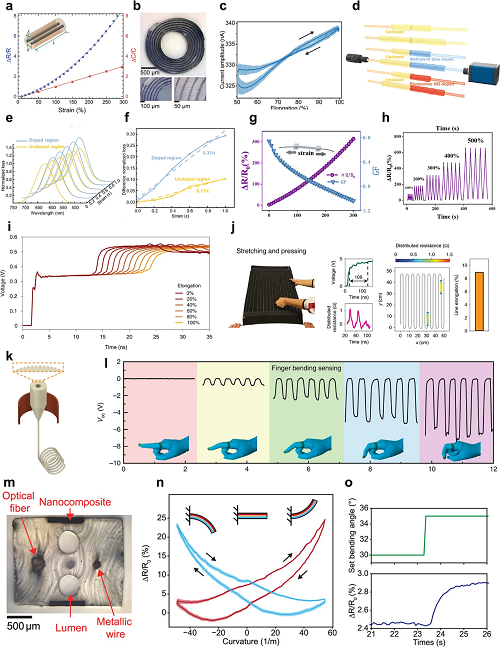
图5. 用于应变与弯曲传感的热拉伸纤维。a 电阻式与电容式应变传感器的结构及性能对比。b, c 电容式应变纤维传感器的光学照片及其实际应变传感性能。d 光电式应变传感器的测试装置示意图。e, f 应变传感器在不同应变下的归一化吸收光谱变化及其差值归一化损耗曲线。g HTLSF 的相对电阻与 GF随应变的变化关系。h HTLSF 在不同应变水平下的相对电阻变化。i 随应变变化的波形图。j 对多点压力与应变的同步测量。k 具有微米级表面纹理的 TENG 纤维制备示意图。l 手指弯曲传感器示意图。m 集成了两个纳米复合电极的弯曲传感纤维的截面光学图像,n 两个电极的相对电阻随纤维曲率的变化关系。o 纤维对5°角度变化的传感示意图。
2.4 热拉伸化学传感器
化学传感器能够对目标物进行定性和高灵敏度定量检测,在生物医学、环境监测等诸多领域具有广泛应用价值。热拉伸化学传感器可分为光化学传感器和电化学传感器两类,它们各具独特的检测能力与应用潜力。
光化学传感器利用光作为一种非侵入式能量形式来感应各种刺激。其中,光子带隙(PBG)光纤通过设计周期性结构来控制光传播,仅允许带隙外特定波长的光被反射。Stolyarov等人结合化学发光(CL)反应与PBG光纤原理,采用热拉伸制备了空心多层PBG结构的纤维(图6a,b),实现对过氧化氢蒸汽的检测,最低检测浓度达100 ppb。然而,光纤数值孔径、传输损耗和弯曲损耗等因素限制了光化学传感器的灵敏度。Gumennik等人采用单片集成方法,以Se97S3作为CL材料,在整个纤维长度上实现了分布式化学传感(图6c),将过氧化氢的最低检测浓度进一步降低至10 ppb。总体而言,光化学传感器具有灵敏度高、信号传输损耗低以及检测下限极低的优点。
电化学传感器具有测试简便、成本低的特点,主要应用在定量分析领域。Guo等人在光寻址电位传感器(LAPS)基础上,通过热拉伸制备了可同时测量14个像素pH变化的一体化pH探头,实现了空间pH传感(图6d)。Richard等人制备了三电极电化学纤维传感器,并通过构建具有高表面积的毛细管结构(图6e,f),使其灵敏度达到与商业丝网印刷电极相当的水平,证明了其对扑热息痛的检测能力。此外,化学传感器还可实现离子浓度的量化检测。例如,Nishimoto等人在炭黑浸渍聚乙烯(CB-CPE)中引入碳纳米管(CNT),通过调整CNT含量显著提升了纤维的电化学传感性能(图6g),在体外环境中对多巴胺(DA)的检测下限低至10 nM。在用离子敏感膜(ISM)功能化纤维后,还能选择性监测Na+浓度。总而言之,电化学传感器技术相对成熟,应用较为广泛。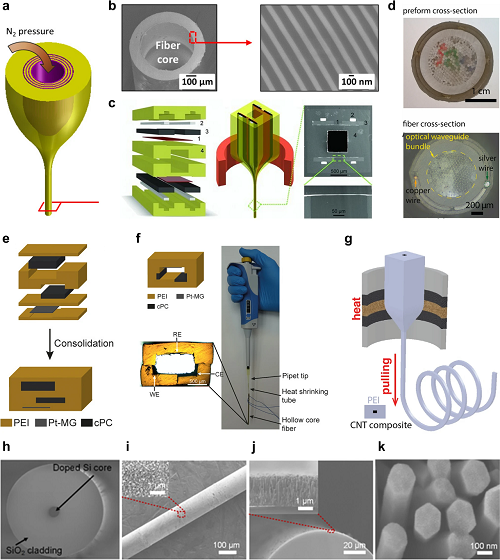
图6. 用于化学传感的热拉伸纤维。a, b PBG 纤维的制备工艺及其工作原理。c 一种完全分布式化学传感器。d 基于 LAPS 的 pH 探针。e 三电极电化学传感器预制棒的制备过程。f 中空芯纤维的横截面。g CNT 复合纤维的制备方法。h–k Co 掺杂 ZnO 纳米棒化学传感器的 SEM 图像。
2.5 热拉伸生物传感器
柔性生物传感器是现代生物医学领域中的重要组成部分,植入式神经探针是研究神经系统疾病的重要工具。然而,常用硅基材料的弹性模量远大于神经组织,长期应用时,易导致神经元损伤。因此,开发具有高信噪比、高生物兼容性,能够长期稳定使用的神经探针具有重要的研究意义。
随着光遗传学的发展,利用光敏蛋白(如ChR2)可以实现特定神经元活动的精确刺激或抑制。光已经成为了神经探针的主要刺激方式。为了提高生物兼容性,延长使用寿命,已经出现了两种解决方案。
第一种方案是采用全聚合物材料。2015年,Canales等人首次制备了集成光学波导(PC/COC)、CPE电极和微流体通道的神经探针(图7a),同时实现了光遗传刺激、电信号记录和药物递送功能,在小鼠体内稳定运行两个月(图7b,c)。为改善CPE导电性不足,尺寸偏大的缺点,Park等在CPE中掺杂5%石墨(图7d,e),将探针直径缩小至200μm以下,使用寿命延长至三个月(图7f,g)。最近,Jeon等人通过热拉伸制备PC/PMMA同轴纤维作为波导,外侧包裹CNT片(图7h),实现了长达一年的稳定记录(图7i),这标志着热拉伸神经探针领域前所未有的突破。
金属电极的导电性好,但是柔性和生物兼容性差,而且熔化温度(Tm)较高,很难与低光传输损耗的聚合物材料适配。因此,出现了第二类解决方案,选用低Tm金属电极材料,并尽可能减小电极尺寸。Canales等人通过两步热拉伸制备多金属电极阵列纤维,将Sn电极直径缩小至5μm(图7j),经刻蚀后纤维尺寸降至85μm(图7k-m),使用寿命达三个月。Du等设计双包层波导结构(PVDF/PMMA)(图7n),加入金属丝电极降低阻抗(图7o),实现在高信噪比(SNR=30dB)下长期(≥10周)同步光刺激和神经记录(图7p,q)。
除光刺激外,神经探针还可通过电信号调控神经元活动。为提高使用寿命,电刺激神经探针同样需提升柔性并减小尺寸。在CPE中掺杂2%的CNF后,热拉伸过程中CNF原位排列(图7r),显著提升了电极电导率,使神经探针尺寸缩小至100μm×100μm以内,记录点尺寸与单个神经元相当。金属玻璃(MG)作为非晶态金属材料,在电导率、尺寸控制和化学稳定性方面表现出更好综合性能。Yan等人通过多次热拉伸实现了尺寸约40nm的均匀有序MG纤维的可控生产(图7s)。在此基础上制作的探针能稳定实现电刺激和神经活动记录(图7t,u)。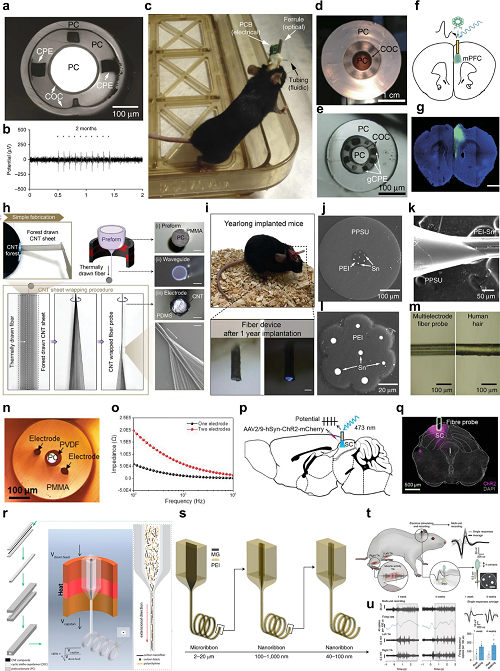
图7. 用于生物传感的热拉伸纤维。a 多模态纤维的横截面图。b 持续两个月的电生理记录。c 将多模态纤维植入小鼠体内。d, e 带有 gCPE 电极的多模态纤维预制棒及其纤维的横截面图。f、g 通过探针进行病毒递送的示意图。h SAMP 的制备工艺。i SAMP 植入小鼠一年后的图像。j 多电极探针的 SEM 横截面图。k–m 经 PPSU 蚀刻后,多电极探针直径约为85μm。n 带有两个金属电极的纤维图。o 纤维内不同电极的阻抗对比。p, q 探针植入SC。r 复合纤维的制备流程。s 通过多步拉伸制备纳米级纤维。t, u 基于 MG 纤维的电刺激与电记录应用。
2.6 热拉伸光电传感器
热拉伸光电传感器已经非常成熟,本节仅介绍近年来两种有效提升性能的策略。2018年,Rein等人在预制棒中留出了间隔固定距离的凹槽,用于放置高性能半导体二极管(图8a)。在拉伸过程中,二极管轴向分离,电极横向收缩,直至与二极管电接触(图8b)。通过此方法集成发光和光探测p-i-n二极管,分别得到了具有发光和光探测能力的纤维。通过在相距一米的两个织物上分别编入发光纤维和光探测纤维,可以实现光通信功能(图8c)。此外,纤维还可以检测心率(图8d)。这种开创性的方法有助于进一步提升热拉伸纤维中的器件集成度和功能多样性,展示了纤维“摩尔定律”的发展前景。
另一方面,系统研究晶体半导体(Si和Ge)的热拉伸行为,对提升传感器性能同样重要。Wang等人深入剖析了Si和Ge在热拉伸过程中的可能出现的问题,包括残余应力导致的裂纹和断裂、毛细不稳定性现象等(图8e),将其原因归结为玻璃包层和半导体芯之间热膨胀系数不匹配。为实现Ge半导体纤维的稳定拉伸,将SiO2包层换为铝硅酸盐玻璃(ASG)。优化后,一次热拉伸就可实现超长、连续的半导体光纤。进一步将去除包层后的半导体纤维与金属丝、导电聚合物和绝缘聚合物共同拉伸为具有单芯和双芯结构的光电纤维。纤维性能与商用平面型光电探测器相当,且具有较好的柔性。编成织物后可以应用在环境光探测、心率检测等多个领域(图8f,g)。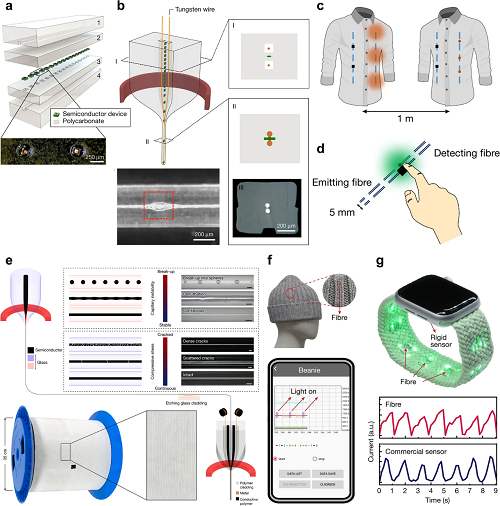
图8. 用于光电传感的热拉伸纤维。a, b 二极管纤维的制备。c 光通信示意图。d 心率检测应用。e 半导体光电纤维的制备。f, g 用于环境光检测与心率监测的光电纤维织物。
2.7 新兴的热拉伸传感器
热拉伸工艺作为新兴的纤维制备技术,在微流量、磁、湿度等传感领域的研究仍处于初期阶段,本节简要概述这三类传感器,为相关研究人员提供指导。
微流量传感器能够定位流体位置、分析流量,是临床医学,药物输送等领域的关键元件,其传感原理包括热流、电容、TENG等。其中热流传感在灵敏度、测量范围和功耗方面更具优势,但灵敏度、压降、温升与测量范围的平衡是难点。Chen等人以CPE为热膜(图9a-d),制备的纤维传感器在保持384 mV/(μL min⁻1)的流速灵敏度的同时,最大温升仅为20℃,比典型MEMS传感器低5-10倍。同时设计了多段结构,能够在5-200μLmin⁻1的范围内高分辨率检测流速(图9e,f)。不过热流传感器对介质纯度要求高且热损失影响低流速检测。为避免此缺陷,Dong等人基于电容原理制备了微流量传感器,PC包层中内嵌上下两个CPE电极以提供电容信号(图9g-j)。传感器不仅能检测前沿流体位置,还将检测流速范围提升至50nL min⁻1-10mL min⁻1(图9k, l),甚至还能估计液体浓度(图9m)。
磁传感器可检测磁场强度与方向,用于非接触式定位。其中,氮空位(NV)量子磁强计因基于自旋的量子特性优势显著,但光学、微波与磁激发的集成难题限制了其应用。Maayani等人先高温拉伸含NV金刚石液体的空心硅纤维并涂覆保护层,再与光电二极管、铜丝电极及PC共拉伸(图9n),最终嵌入同轴电缆提供微波激发。所得分布式磁传感器实现90米长度、102监测点的高灵敏度磁测量,水下测试稳定性良好(图9o, p)。
湿度传感器是环境监测、工业生产及生物医疗等领域的关键工具。但目前仅实现了一种热拉伸湿度传感纤维。Tousi等人选用多孔PEI传感材料、Cu丝电极、聚苯砜(PPSU)包层制作预制棒 (图9q)。通过控制预制棒含水量及热拉伸冷却速度,在PEI中原位生成多孔结构,使传感器在70%~80%RH范围内灵敏度达0.39 pF/%RH(图9s),且温度依赖性低、循环稳定性好。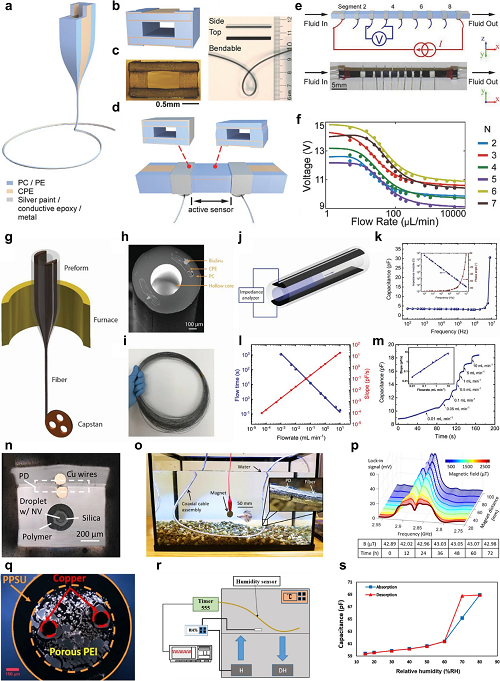
图9. 用于流量、磁场与湿度传感的热拉伸纤维。a–d 流量纤维传感器的制备。e, f 八段式纤维传感器流量测试示意图。g–i 电容式流量传感器的制备。j, k 该纤维的电容性能。l, m 纤维对流量的检测结果。n 磁场传感器的横截面图。o, p 水下磁测量实验。q 湿度传感器的横截面图。r 湿度测量装置示意图。s 在不同RH下电容的变化。
2.8 多响应热拉伸传感器
随着柔性电子技术的发展,提高器件集成度与功能多样性成为了未来的发展趋势,对多响应传感器的研究迫在眉睫。但目前,热拉伸多响应纤维传感器仍处于起步阶段,仅有少数研究人员做了尝试。
Chen等人基于TENG,制备了一种既能监测接触位置,又能感应离子浓度变化的多功能纤维。通过可溶芯法制备中空SEBS纤维(图10a),再将液态金属浸入空心纤维中。优越的柔性使其可以布置在各种物体表面。以棒球手套为例,纤维传感网络可以三维定位接触位置,还能估计接触速度(图10b,c)。除此之外,纤维具有防水的特点,能用于海底探测感应离子运动和浓度变化(图10d)。
Sahasrabudhe等人集成了多个μLEDs、电极和微流体通道,制备了一种既可以检测温度,又能传输并记录生理信号的神经探针(图10e-h)。μLEDs是探针中的关键部件,既可以利用电流的线性温度依赖性实现温度传感,也可以用作光源施加刺激。探针首次应用到形状复杂的肠道内。并与NeuroStack模块耦合,可以实时无线控制感觉上皮细胞并传输信息,这为肠等器官与大脑双向通信的建立提供了关键信息。
近期,Gupta等人制备了单纤维计算机,集成了传感、存储、处理与通信功能。通过可折叠插音器方法将平面微器件的二维布局映射至三维纤维结构,结合螺旋铜导线与弹性聚合物包层(图10i),赋予纤维超60%的拉伸性及耐洗性。每根纤维集成32位浮点微控制器(MCU)与多模态传感器(包括光电探测器、温度传感器、PPG传感器和加速度计)(图10j,k),通过I2C总线实现分布式数据处理。将四根纤维嵌入衣物后,可实现95%概率的身体活动预测,充分体现了分布式复合传感网络的优势。随着纤维“摩尔定律”的提出,高密度器件集成将更易实现,热拉伸纤维状复合传感器的应用前景将更加广泛。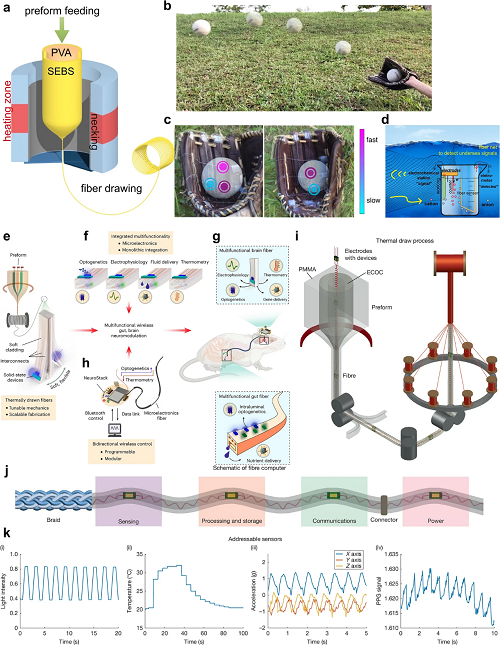
图10. 用于多功能传感的热拉伸纤维。a–d 机械与离子浓度多功能传感器。e–h 温度与生物多功能传感器。i-k单纤维计算机。
III 总结
作为柔性电子与智能传感的重要分支,热拉伸功能纤维(TDFS)将在材料多样性、结构定制化、工艺稳定性及功能集成度等方面实现显著提升。在跨学科发展的背景下,大规模制备的TDFS与柔性电子皮肤、智能纺织品的深度融合将彻底变革人机交互界面的设计逻辑。结合深度学习算法,这种融合将进一步实现对多种人体生理信号更精准、便捷的识别与预测。TDFS是一类极具前景的柔性传感器,未来必将无缝融入日常生活,并有力推动智能机器人、生物医学工程等众多领域的技术创新。
希望本综述将有助于全面了解热拉伸纤维传感器的发展现状,并为其未来发展提供指导与见解,助力相关创新以推动柔性电子技术的进一步发展。
作者简介

关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 中科院工程热物理所张挺等综述:热拉伸柔性纤维传感器的最新进展