研究背景
在广袤的海洋中,章鱼凭借其灵活的手臂、柔软且坚韧的肌肉和强大的吸盘,能够毫不费力地抓握和释放海洋环境中的各种物体,而不会造成破坏。受章鱼启发的柔性抓取器,凭借其高适应性、安全性和灵活性,在工业制造、医疗健康、农业与食品业等多个领域展现出独特价值。然而,由于材料的生物力学不匹配、柔韧性不足,仿生结构难以构筑等问题,难以实现章鱼手臂灵活的操控能力。此外,尤其是在水下操纵柔软易碎的食物等精细物体时,需要轻柔的接触和稳定的附着力,这对现有的软体抓取器构成了严峻的挑战。基于此,开发一种能够适应特定形状要求、实现稳健抓取能力并具备主动释放机制以防止损坏的粘附抓取设备至关重要,同时也对材料设计和结构制造提出了重大挑战。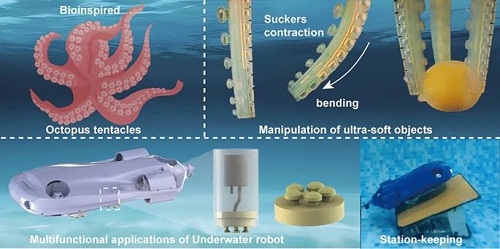
Octopus Inspired Self Adaptive Hydrogel Gripper Capable of Manipulating Ultra Soft Objects
Yixian Wang, Desheng Liu*, Danli Hu, Chao Wang, Zonggang Li, Jiayu Wu, Pan Jiang, Xingxing Yang, Changcheng Bai, Zhongying Ji, Xin Jia*, Xiaolong Wang*
Nano-Micro Letters (2026)18: 33
https://doi.org/10.1007/s40820-025-01880-4
本文亮点
1. 材料创新:本研究创新性利用强弱氢键相互作用与微相分离协同机制,成功制备出 3D 打印超分子水凝胶。该材料的力学性能可精准调控,解决了传统水凝胶 “柔性与强度难以兼顾” 的问题,为 3D 打印功能水凝胶材料的设计提供了新范式。
2. 技术革新:研究团队采用光固化3D打印技术,精准设计并制造出具有不同率膜的仿章鱼吸盘。通过结构优化,吸盘实现了对不同表面的可靠贴合与温和的自适应粘/脱附,突破了传统仿生吸盘 “吸附稳定性差、脱附难度高” 的技术痛点,为柔性仿生吸附器件的高效制备提供了关键技术支撑。
3. 应用前景广阔:依托借助超分子水凝胶材料优异的柔韧性,结合仿章鱼触手的多级仿生结构,研究进一步集成了具有高度仿生结构的水凝胶抓取器。该抓取器能够通过无损表面释放机制,对超软水下物体实现精细化操控——从柔软易损的蛋黄、豆腐,到形态各异的生物组织,均能实现 “抓得稳、放得准、无损伤”,在食品加工、水下作业、生物医疗(如软组织操作)等领域展现出广阔应用潜力。
内容简介
目前,随着材料科学、人工智能与驱动技术的突破性发展,柔性抓取器正加速从工业自动化场景向医疗护理、家庭服务等更广泛领域渗透,已成为人机协同交互体系中的核心支撑技术之一。然而,现有柔性抓取技术仍然面临关键瓶颈问题:在抓取不规则、超软质地或易碎特性的目标物品时,受限于材料柔韧性不足、抓取力精准调控难度大等问题,往往无法与物品表面的轻柔适配接触,极易造成被抓取物品的结构损坏或功能失效,严重制约了其在精密操作场景中的应用。
为了突破这一技术困境,受章鱼吸盘漏斗结构和柔性触手的启发,中国科学院兰州化学物理研究所王晓龙研究员团队以自然界中章鱼的漏斗吸盘结构与柔性触手为仿生原型,创新性地将多氢键介导的超分子水凝胶与光固化3D打印技术深度融合,成功开发出一款具备自适应操控能力的液压驱动水凝胶抓取器。该抓取器通过材料与结构的协同设计,实现了粘附能力的动态转换,为超软物体的无损操控提供了全新解决方案。此外,将水凝胶吸盘与水下无人航行器、六足机器人相结合,使其获得了操控物体、水下驻留、水下爬行等特殊功能。此项研究开发的自适应水凝胶软抓取器,不仅为柔性抓取技术提供了 “材料-结构-功能” 一体化的创新范式,更在机器人精密操作、生物医学工程(如软组织移植、器官转运)、深海资源勘探等领域展现出极具潜力的应用前景,有望推动柔性智能装备向更复杂、更精细的应用场景突破。
图文导读
I 仿生章鱼水凝胶抓取器的设计和制造
受章鱼柔软触手及其独特的自适应吸盘结构(主要功能为粘附与脱附)的启发,研究团队通过将光固化3D 打印技术与机械适应性超分子水凝胶相结合,成功开发了一种具有自适应操控功能的水凝胶软抓取器(图 1a 和 1b)。团队利用水凝胶单体N-丙烯酰基氨基脲(NASC)、丙烯酸(AAc)、丙烯酰胺(AAm)之间的多种强弱氢键之间的协同作用和微相分离过程,制备了具有可调机械性能的柔韧水凝胶材料(图 1c 和 1d)。为验证该墨水体系的超分子作用机制,团队通过密度泛函理论(DFT)进行计算分析,结果显示:NASC 与 AAc、NASC 与 NASC、NASC 与 AAm 的结合能分别达到 – 49.29 kJ/mol、-47.85 kJ/mol、-12.73 kJ/mol。这一数据明确证实了水凝胶系统中存在强/弱氢键超分子网络,而该网络正是实现材料机械性能精准调控的核心微观机制。为了验证材料的3D打印适配性,团队进一步利用流变仪对光敏水凝胶墨水的光聚合动力学行为进行表征。实验发现:在405nm紫外(UV)光源照射下,墨水的粘度、储能模量与耗散模量均随照射时间延长先快速上升,随后趋于稳定并维持在较高水平,表面其固化深度与UV 照射参数(如照射时间、光强)存在明确的构效关系,为后续 3D 打印工艺参数优化提供了关键实验依据。同时,双键转化率测试结果显示:经16 s UV 照射后,墨水的双键转化率已超过90%,充分证明该光敏墨水具备优异的光聚合效率,可满足高精度 3D 打印对材料固化速度与成型稳定性的严苛要求。通过调控三种单体之间多重强弱氢键的相互作用强度与分布,可实现超分子水凝胶机械性能的可控优化,进而获得适用于软抓取器的 “柔软-坚韧” 平衡型材料。如图 1d 所示,用于自适应软抓取器制备的优化后超分子水凝胶,其力学性能指标如下:拉伸强度为 1.30 ± 0.07 MPa,断裂伸长率达 893.88 ± 55.55%,杨氏模量为 0.24 ± 0.02 MPa,断裂能为 0.65 ± 0.33 kJ/m2,韧性则达到 6.87 ± 0.66 MJ/m3。该组数据表明,所制备的水凝胶材料同时兼具高柔韧性与结构稳定性,可满足软抓取场景对材料力学性能的多重需求。得益于仿生吸盘结构与柔软触手特性的协同作用,该水凝胶软抓取器能够实现对水下复杂物体的精准操控,尤其在超软表面物体(如蛋黄)的抓取与无损释放过程中表现突出(图1e)。这一特性为解决水下超软、易碎物体的非破坏性处理难题提供了创新性技术路径,也为后续柔性抓取器件在生物医疗、水下作业等领域的应用奠定了关键材料与结构基础。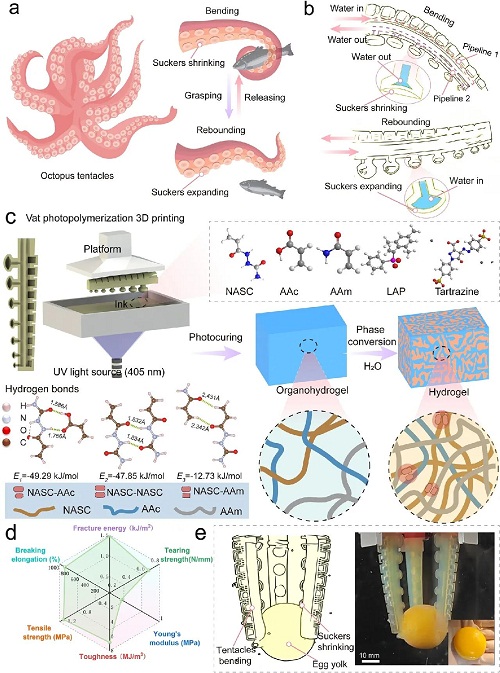
图1. 受章鱼启发的自适应水凝胶抓取器的设计制造流程图。(a) 章鱼用吸盘和触手的捕食行为示意图。(b)水凝胶抓取器的设计原理和液压驱动机构示意图。(c) 超分子水凝胶的光敏墨水组成、反应机理和多氢键相互作用,以及章鱼水凝胶软抓取器的制备工艺。(d) 优化后的超分子水凝胶机械性能。(e)水凝胶抓取器操控蛋黄等水下超软物体的示意图和照片。
II 超分子水凝胶的力学性能调谐与机理
在软体抓取器研究中,核心挑战在于需兼顾适配的机械性能:既要在循环气动/液压驱动下保持结构鲁棒性与功能稳定性,又要避免本体或界面出现泄漏、失效。针对此,团队通过强氢键(例如NASC和NASC之间以及NASC和AAc之间的相互作用)和弱氢键(例如NASC和AAm之间)的协同调控,设计了一种具有可调机械性能的超分子水凝胶,用于自适应软抓取器制造。如图2a-c所示,由于酰胺键和尿基之间的强氢键相互作用,PNASC水凝胶表现出塑性机械性能。AAc的引入能够有效地将PNASC水凝胶的机械性能从塑性调节为弹性,这是由于P(NASC-co-AAc)水凝胶中尿基-尿基以及尿基-羧基之间的非协同氢键相互作用的存在。然而,P(NASC-co-AAc)水凝胶的模量和韧性过高,使其不适合用于制造软抓取器。为获得柔软特性,引入AAm构筑P(NASC-co-AAm)水凝胶,利用尿素和氨基之间的弱氢键相互作用调节机械性能,却因弱氢键的过度存在,导致水凝胶的强度、模量和韧性显著下降。因此,将具有强氢键和弱氢键的AAc和AAm同时引入NASC中,通过改变氢键超分子网络的密度,制备出一系列机械性能可调的poly(NASC-co-AAc-co-AAm)水凝胶(图2d-f)。小角X射线散射(SAXS)测试,以进一步验证超分子聚合物水凝胶机械行为调控的机制。如图2g和2h所示,水凝胶在未拉伸状态下具有显著的固有微相分离结构,这是由于存在强和弱多重氢键相互作用。当拉伸应变逐渐增加到400%时,可以发现二维SAXS散射图案呈纺锤形,并且峰强度迅速降低。当水凝胶进一步拉伸至800%应变时,这一趋势更加明显。这些结果证实了超分子水凝胶的微相分离域沿拉伸方向逐渐发生变形取向和解体,同时伴随着一些较弱的氢键网络的断裂(图2i)。综上,通过改变单体的含量,可以有效地调节超分子水凝胶中的强氢键和弱氢键相互作用,从而使超分子水凝胶具有最佳的机械性能,包括强度、模量、韧性和延展性,满足软抓取器的应用需求。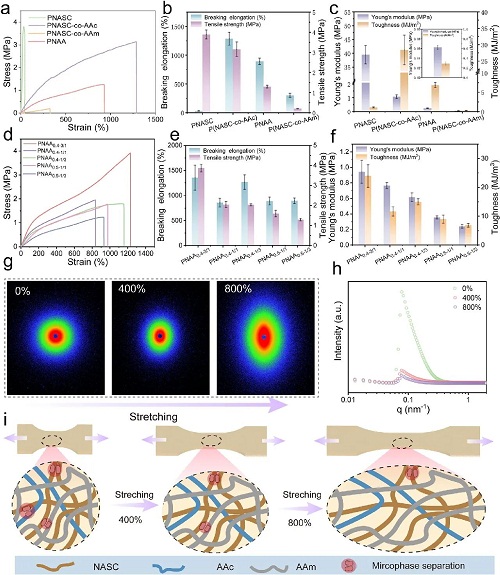
图2. 超分子水凝胶的力学性能调谐与机理。(a-f) 超分子水凝胶的力学性能图。(g-h) 超分子水凝胶在不同拉伸应变下SAXS散射图。(i) 超分子水凝胶通过微相分离结构域的强化和变韧机理示意图。
III 粘附可切换的仿生章鱼水凝胶吸盘
如图3a所示,章鱼启发的可切换水凝胶吸盘(直径7毫米)由具有受控曲率的主动膜(红色)和结构柄(黄色)组成。吸盘在接触面上具有曲率,以加强对接触形成的控制,而外杆的倾斜角度提高了顺应性或拉拔力。其可切换粘附机制的核心的在于:通过向柄部空腔施加压差∆P,驱动主动膜实现对目标物体的附着与可控释放。具体而言,负压状态(∆P <0)下驱动附着,正压状态(∆P> 0)下实现脱附。此外,不同曲率类型(凸面:K > 0;平面:K = 0;凹面:K < 0)的该仿生水凝胶吸盘均展现出优异粘附性能(图 3b)。如图 3c 所示,对比实验表明:由 PNASC、P (NASC-co-AAc) 及 P (NASC-co-AAm) 水凝胶制备的吸盘,因材料刚度不匹配难以建立稳定接触,故粘附力显著较低;而采用机械性能优化的 PNAA 水凝胶制备的吸盘,可实现更优的粘附强度,印证了材料力学性能与吸盘功能的适配性。基于此,通过调控压差可精准驱动可变曲率主动膜运动,使其在粘附过程中与不规则表面实现温和且可靠的贴合(图 3d)。性能测试显示(图 3e),该仿生水凝胶吸盘的粘附力达 1.08 ± 0.03 N,且可通过调节压差与预加载力实现精准调控。如图 3g、3h 所示,水凝胶吸盘能够在水条件下轻松抓取和释放具有各种形状和特征的物体,包括具有平面和曲面的不锈钢,以及具有曲面的玻璃和塑料。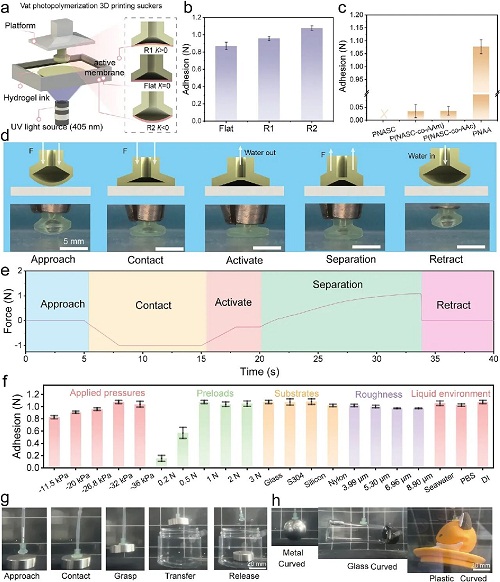
图3. 超分子水凝胶吸盘的可切换粘附性能。(a) 光固化3D打印具有不同曲率膜的吸盘示意图。(b) 具有不同曲率膜的水凝胶吸盘粘附强度。(c) PNASC、PNASC-co-AAc、PNASC-co-AAm和PNAA水凝胶吸盘的粘附强度。(d)吸盘粘附过程示意图。(e) 水凝胶吸盘在表面粘附和释放的粘附力曲线。(f)水凝胶吸盘在不同施加压力、预载荷、基底和粗糙度表面的粘附性能。(g-h) 超分子水凝胶吸盘水下环境抓取和释放演示图。
IV 液压驱动水凝胶软驱动器的制造和性能表征
为了评估液压驱动的水凝胶软驱动器的性能,实验采用注射泵控制驱动器动作,同时结合压力传感器与数码相机实现实时数据采集(图 4a)。首先对驱动器单元(7 mm×7 mm×7 mm,壁厚0.7mm)进行压力膨胀测试。如图4b-d所示,由三种不同硬度的PNAA水凝胶制成的空腔体积为0.343毫升的立方体气动装置在注水后显示出相似的体积膨胀过程,但压力变化可分为明显阶段:t₁-t₂阶段,注水量增加使压力显著上升,而装置体积变化极小(图 4d),这源于超分子水凝胶优异的弹性(材料未发生显著形变),仅表现为弹性应力累积;t₂-t₃阶段,压力逐渐降至稳定值,此时水凝胶分子链逐步发生局部破坏,材料从弹性阶段过渡至弹塑性阶段;t₃-t₄阶段,装置在稳定压力下快速膨胀(图 4b、4d);t₅阶段装置发生破裂。基于此机制,PNAA0.4-1/2、PNAA0.4-1/3、PNAA0.5-1/3 三种模量的液压装置均展现出优异膨胀性能,体积膨胀倍数超 60 倍(图 4c)。值得注意的是,低模量 PNAA0.5-1/3 水凝胶制备的装置,其最小驱动压力仅需 35.18 ± 2.53 kPa,显著降低了驱动能耗。为进一步探究结构参数对驱动性能的影响,团队制备了厚度与模量可调的液压水凝胶致动器,并分析其驱动压力需求。结果显示:相同刚度下,壁厚越小的致动器,所需驱动压力、驱动能量及能量耗散均显著降低,更易实现完全弯曲(图 4f、4g);研究发现,壁厚较小的水凝胶致动器在相同的刚度下表现出较低的压力、能量和耗散能量需求,从而有利于软驱动器的变形能力。此外,在相同壁厚(2.75 mm)下,较软的水凝胶液压驱动器仅需要较低的驱动压力。如图所示,水凝胶驱动器具有低驱动压力(76 kPa)、优异的变形角度(150°)、良好的环境适应性和高抓取力(1.5 N)等卓越的驱动性能。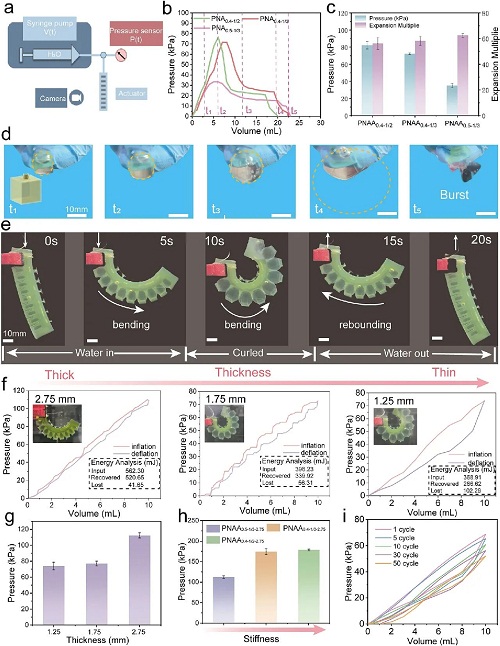
图4. 水凝胶驱动器的制造和性能表征。(a) 水凝胶驱动器性能的测试系统示意图。(b) 水凝胶单元驱动器在膨胀过程中的压力与体积关系图。(c) 三种不同模量水凝胶单元驱动器的膨胀倍数及所需的驱动压力。(d) 水凝胶单元驱动器在不同膨胀状态下的照片。(e) 水凝胶驱动器工作过程照片。(f) 不同厚度的液压驱动水凝胶驱动器的压力-体积曲线。(g-h) 不同厚度和刚度的水凝胶驱动器所需的驱动压力。(i) 水凝胶驱动器循环稳定性。
V 仿生章鱼水凝胶抓取器的水下抓取和操控演示
依托超分子水凝胶 “柔软-坚固”兼顾的力学特性、吸盘的自适应粘附性能及软驱动器优异的液压驱动性能,研究团队进一步设计并开发出仿生章鱼触手结构的液压驱动水凝胶软抓取器。该软抓取器采用双注射泵实现独立控制:其一连接吸盘管道,通过调控吸盘膜的收缩与舒张,精准完成物体的粘附与释放动作;其二连接驱动器管道,通过控制驱动器的弯曲与回缩,实现物体的抓取与复位(图5a-c)。为验证软抓取器在水下物体处理中的多功能性,团队设计并制备了单指、双指及多指三种构型的软抓取器(图 5d),各构型依托结构特性展现出差异化优势。单指抓取器:借助触手的自适应形变能力与吸盘的稳定粘附力,可实现对不锈钢、玻璃、塑料等材质物体的高效抓取,尤其针对不规则形状的平面、曲面构件及折叠薄型物体,能达成传统单指抓取器难以实现的紧密贴合与稳定粘附;双指抓取器:具备兼顾硬质与超软物体的操控能力,既能稳定抓取不同厚度的塑料瓶(硬质曲面物体),也能轻柔操控软豆腐块(超软易损物体),避免抓取过程中物体损伤;多指抓取器:通过多触手的协同作用,可适配复杂形态超软物体的精准抓取需求,对蛋黄、豆腐等易损超软物体实现 “抓取-释放” 全流程无损操作,核心在于多触点的压力均匀分布与吸盘的可控粘附/脱附协同。为推动软抓取器的智能化应用,团队进一步将其与机械臂系统集成: 配备双水凝胶软抓取器的机械臂,依托吸盘与驱动器的协同控制,可精准完成各类形状物体的抓取与释放,尤其针对豆腐、蛋黄等超软易损物体,能始终保持无损操作。这种 “水凝胶软抓取器-机械臂” 集成系统,为水下环境中物体的精准转运、柔性操控提供了创新技术方案,在水下作业、生物医疗(如水下软组织转运)等领域展现出广阔应用潜力。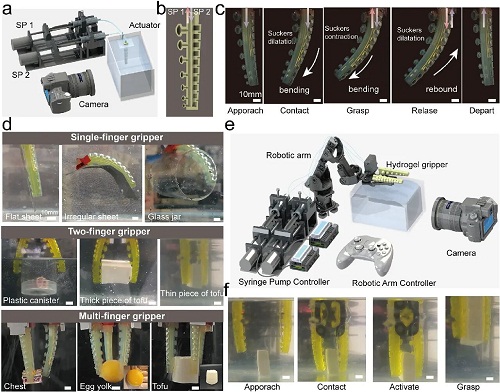
图5. 仿生章鱼水凝胶抓取器的多功能演示。(a) 水凝胶抓取器的操控系统示意图。(b) 水凝胶抓取器的剖面图。(c) 水凝胶抓取器的工作过程图。(d) 单臂、双臂、多臂水凝胶抓取器的多功能演示图。(e) 水凝胶抓取器系统的多功能演示图。
VI 水下机器人领域应用展示
为全面展示水凝胶粘附设备在水下环境中的广阔应用前景和多功能操作能力,研究团队设计了两类配备水凝胶粘附设备的水下无人航行器和六足爬行机器人,如图6a所示。这种无人水下航行器能够通过水凝胶吸盘结构在水下倾斜/水平木板表面实现接近、驻留、和脱离操作(图6b、c)。六足水下爬行机器人能够实现,在水下能够实现在平面的爬行和倒立爬行(图6d、e)。该概念验证演示展示了受章鱼启发的水凝胶粘附设备在许多水下干预任务中的潜在应用,例如海洋设备维护、水下考古和深海探索。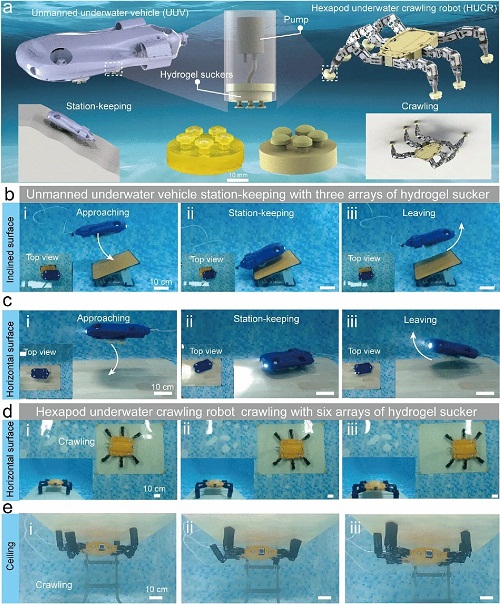
图5. 水下机器人的应用展示图。(a) 基于水凝胶粘附设备的水下航行器和六足机器人的结构示意图。(b-c) 基于水凝胶粘附设备的水下航行器的功能演示图。(d-e) 基于水凝胶粘附设备的水下六足机器人功能演示图。
VII 总结
本研究展示了一种受章鱼启发的自适应水凝胶软抓取器,它能够通过可切换的仿生吸盘和液压驱动的触手协同整合来操控水下超软物体。在关键材料与结构设计方面:团队通过强弱氢键协同作用,设计出机械性能可调的超分子水凝胶,为软抓取器提供了 “柔软-坚固” 兼顾的材料基础;同时利用光固化3D 打印技术,构建出仿生水凝胶吸盘。该吸盘由可调曲率膜、负压腔及气动腔组成,其中水凝胶曲率膜可精准调控吸盘脱附过程,为自适应粘附提供结构支撑。为优化驱动性能,团队进一步设计并制备了厚度与刚度可变的复杂水凝胶软体驱动器,系统评估其水下膨胀系数与弯曲变形能力,验证了驱动器对软抓取器动作的可靠驱动效果。实验结果表明,基于上述设计的单指、双指和多指水凝胶软抓取器能够精细地处理不同尺寸、形状和属性的水下物体。不仅能稳定抓取常规硬质/软质物体,更能对超软豆腐、生蛋黄等易损物体实现 “抓取—释放” 全流程无损操作,充分体现了软抓取器的柔性适配性与操控精准性。 此外,研究团队还将水凝胶粘附设备与水下无人航行器、六足机器人相结合,使其获得了操控物体、水下驻留、水下爬行等特殊功能。这种特定应用的自适应水凝胶软抓取器为机器人操作、生物医学工程和深海勘探的发展带来广阔的应用前景。
作者简介



关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2024 JCR IF=36.3,学科排名Q1区前2%,中国科学院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 中科院兰州化物所王晓龙等:仿生水凝胶吸盘实现多场景自适应粘附与抓取
 新加坡国立陈伟&哈工大付传凯/马玉林&浙大王利光等:超亲钠离子-电子混合导体界面相助力长寿命准固态钠金属电池
新加坡国立陈伟&哈工大付传凯/马玉林&浙大王利光等:超亲钠离子-电子混合导体界面相助力长寿命准固态钠金属电池 西南交通大学孟凡彬团队:局域场增强与场耗协同解锁低频超薄可级联超材料
西南交通大学孟凡彬团队:局域场增强与场耗协同解锁低频超薄可级联超材料 南工大宗鹏安等:金字塔界面Bi₂Se₃/碳薄膜实现水下双模温度-压力传感
南工大宗鹏安等:金字塔界面Bi₂Se₃/碳薄膜实现水下双模温度-压力传感 国防科技大学孙巍巍、郑春满团队:双壳层硫宿主调控动态电解液微环境,助力实用化锂硫电池
国防科技大学孙巍巍、郑春满团队:双壳层硫宿主调控动态电解液微环境,助力实用化锂硫电池